
2007年、マット・デントンはイギリス、ハンプシャー州の自宅近くの道路脇に車を止め、掘削機が掘削する様子を見ていた。子供の頃から機械に魅了されていたデントンだが、ハリウッドのアニマトロニクス・クリーチャーの制御システムを長年設計してきたデントンは、ショベルの先端にブームが付いたものを、より想像力豊かな視点で捉えていた。「それは実質的に脚の形をしていたんです」と彼は言う。「それで、これを6台買ってシャーシに取り付けたらどうなるかと考え始めたんです」。4年後、デントンは「マンティス」と呼ぶ、重量2トン、高さ9フィート(約2.7メートル)のロボットウォーカーに乗り込み、のろのろと歩き回ることができるようになった。
ハリー・ポッター映画に登場するヒッポグリフ(鷲の頭を持つ空飛ぶ馬)の設計に携わったデントンは、映画や趣味で歩行する六脚歩行ロボットも製作していたが、それらはラジコンカーほどの大きさだった。彼はマンティスをSUVサイズにしたいと考えていた。しかし、一人では資金が足りず、設計図を描き、おもちゃの掘削機のアームを使ってスケールモデルを作り、その模型で資金提供者を募った。しかし、誰も興味を示さなかった。数ヶ月後、友人の裕福な父親がデントンの空想的な計画を聞き、彼のビジョンに感銘を受け、資金提供に同意した。
デントン氏は、機械エンジニアである友人のジョシュ・リー氏にマンティスの製作を手伝ってくれるよう頼んだ。2人は最初の数週間、油圧アクチュエーター(ロボットの脚を動かす人工筋肉)の研究に費やした。一方、デントン氏は、おもちゃサイズの模型用に書いたコードを基に、巨大な六脚ロボットを動かすソフトウェアを改良した。デントン氏とリー氏は、ロボットの中央シャーシと6本の脚の設計図を描き、1本の付属肢を製作・試験し、残りの製作を製造会社に委託した。しかし、アルミニウムと鋼鉄でできた脚がデントン氏の工房に届いたとき、部品をボルトで固定するために必要な穴がいくつか欠けていたり、機械加工が粗雑だったりすることが判明した。我慢できなくなったデントン氏は、1週間かけて自ら欠陥を修正した。「何とか動かさなければならなかった」と彼は言う。

デントンは2011年までに実用プロトタイプを完成させたものの、マンティスは重量が重すぎ、動きが遅すぎた。そこで、重量を400ポンド(約180kg)削減するため、両脚の4つの関節のうち1つを取り外した。関節のおかげで様々な地形で機動性が向上していたが、マンティスは関節がなくても十分に走行できた。デントンはまた、油圧システム、ディーゼルエンジン、電子機器、操縦席を収容するシャーシも簡素化した。
いざ運転する時が来た時、デントンは乗り込もうとしなかった。「怖すぎたんです」と彼は言う。恐怖を和らげるため、彼は6ヶ月かけてWi-Fiを使ったテストを100時間行った。初めての運転は恐怖を感じたが、マンティスは期待通りに動作し、彼は徐々にコックピットに慣れていった。今では、デントンはフェスティバルで自作を披露している。マンティスの速度の遅さを批判する人もいる。時速2マイル(約3.2キロメートル)にも達していないからだ。デントンは、マンティスが映画や建設現場、あるいはその他の分野で将来的に使われるかどうかは確信が持てない。しかし、10代の観客はすぐに理解する。「子供たちは大好きです」と彼は言う。「乗り込んでレーザーをくっつけたがるんです」
仕組み
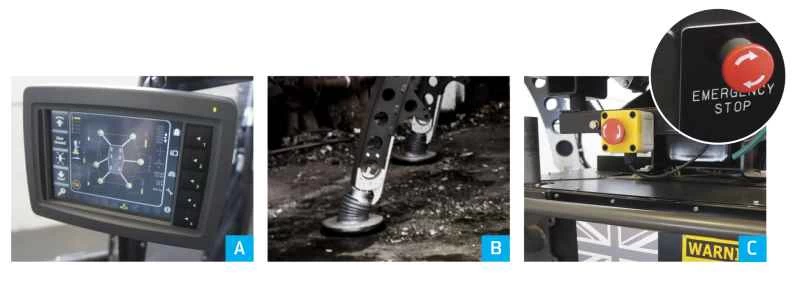
A. コントロール
操縦者はタッチスクリーンのコントロールパネルから複数の歩行パターンから1つを選択します。不整地向けに設計されたモードでは、ロボットは各脚を持ち上げてから前方に振り出します。ジョイスティックを操作することで、機体を前進、後退、または横歩きさせることができます。ジョイスティックをひねると、マンティスはその場で旋回します。
B. センシング
片方の足が地面に着くと、力センサーが搭載コンピューターに信号を送ります。そうして初めて、歩行シーケンスの次の脚が前方に振り出されます。足首のボールジョイントにより、足は回転して不整地でも着地できます。しかし、足が段差にぶつかると、別のセンサーがコンピューターに安全な場所を探すよう指示します。デントン氏は、ロボットが着地前に地面をスキャンできるように、各脚に超音波センサーを搭載したいと考えています。
C. 安全性
緊急事態が発生した場合、「大きな赤いボタンが2つあります」とデントン氏は言う。1つはコックピットのパイロットのすぐ隣、もう1つは機体の後部(デントン氏の友人の1人がマンティスと足並みを揃えて歩き、動物や通行人が足元に落ちないように見守る場所)にある。どちらのボタンも電源を切断し、ロボットをその場で停止させる。
さらに2体の乗れるロボット
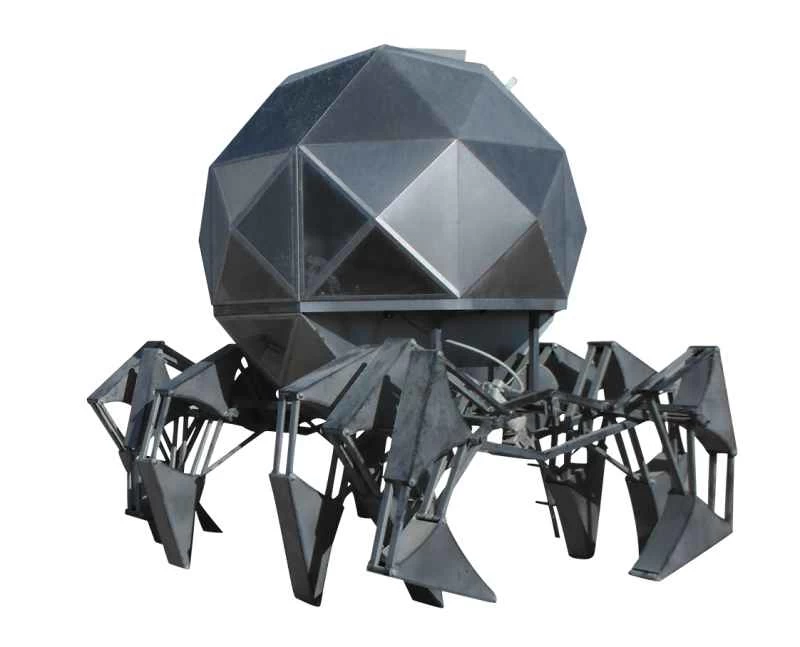
アーティストのスコット・パレンテオは、ネバダ州ブラックロック砂漠で毎年1週間開催されるフェスティバル「バーニングマン」のシェルター兼移動手段として、ジオデシック構造のウォーキング・ポッドをデザインしました。重さ1,800ポンド(約800kg)のこのドームは、バッテリーで駆動する6本の脚2組で動きます。パレンテオは、この「RVアート」が新たな移動式住宅のデザイン、ひいては火星の遊牧民コロニーの実現に繋がることを期待しています。

坂本一は高校時代、テレビアニメ『機動戦士ガンダム』に登場する人型ロボットに夢中になり、おもちゃの模型を組み立てていた。現在46歳のロボット工学者、坂本一は、実物大で高さ59フィート(約17メートル)のロボットを製作したいと考えている。今のところ、高さ11.5フィート(約3.4メートル)の脚を2本製作している。坂本は今年後半に胴体を追加し、高さ13フィート(約4メートル)の歩行器に乗り込み、自由に動き回れるようにしたいと考えている。
警告:すべてのプロジェクトは公開前に審査いたしますが、最終的にはお客様の安全はお客様の責任となります。必ず保護具を着用し、適切な安全対策を講じ、すべての法律および規制を遵守してください。
リリアン・スティーンブリック・ファンとサラ・ジャコビーもこのレポートに貢献した。
この記事はもともと『Popular Science』2013年9月号に掲載されました。
