先を越さないために付け加えると、MITは膨張式ロボット触手を開発している。これはモーターを使わず、空気の噴出に応じて曲げたり掴んだりできる手足だ。しかし、この波打つような部品のインスピレーションは魚にある。そして、ロボット開発の出発点としては、魚の方がよりふさわしい。
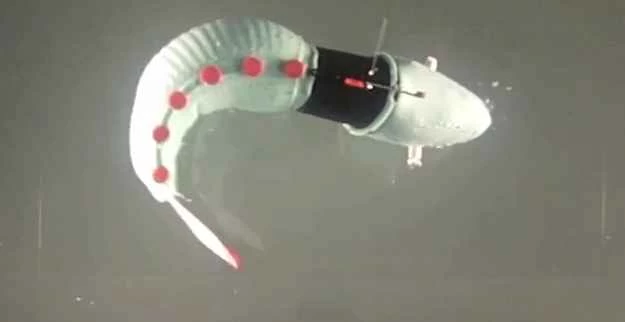
MITの新しい自律型フィッシュボットは、ロボットとしては比較的控えめで、ひたすら泳ぐだけの機械だ。柔軟なシリコンゴム製の尾部は二酸化炭素を動力源として、くねくねと羽ばたきながら曲がるように作られている。ガスを放出するたびに尾部の半分が膨らみ、曲がる。左右交互に膨らませることで、ロボットフィッシュは泳いでいく。これは移動手段としては巧妙だが、このロボットの真骨頂ではない。動くたびに燃料を消費し、搭載されている二酸化炭素タンクは持続的な長距離泳ぎには容量が足りないからだ。このロボットの興味深い点は、その柔らかい体のおかげで、緊急時に何ができるかという点だ。
現実の生物である魚は、追跡者を振り切るために極めて急速な方向転換を行う「逃走動作」を実行できます。MITのロボットフィッシュも同様の行動が可能で、強力な二酸化炭素噴射によって体を素早く横に振り、約100ミリ秒で最大100度旋回します。これはあらゆる種類のロボットにとって高性能な動作であり、柔軟性の重要性をさらに証明しています。
ソフトロボットの確立された利点は容易に推測できます。iRobotと広島大学の研究者たちは、周囲を滑るように動き回り、狭い隙間を通り抜けるために実に不安なほど変形したり、最小限のセンサーと制御アルゴリズムで移動したりするロボットを披露しました。つまり、柔らかいロボットは、硬くて硬いエッジを持つロボットよりも、引っかかったりつまずいたりすることなく、環境内を移動できる可能性があります。柔らかさのもう一つの明らかな利点は安全性です。柔らかいロボットは、物や人にぶつかっても損傷を与えない可能性があります。
MITのロボットフィッシュが実証しているのは、それほど明白ではない。それは、柔らかさがパフォーマンスを向上させるということだ。剛性の高いシステムでも、フィッシュボットの脱出動作に似たようなことはできるかもしれないが、はるかに複雑な機械構造が必要となり、プロペラの助けも必要になるかもしれない。柔軟な尾は、全長にわたって(直角に曲がるのではなく、柔らかい構造全体にわたって)変形することで、水中での旋回を最適化している。高速で強力なモーターに頼ることなく、高速かつ力強く動くのだ。
MITコンピュータサイエンス・人工知能研究所の所長、ダニエラ・ラス氏は、この夏、この魚を外洋でテストしたいと考えている。できればサンゴ礁のような環境で、この機械の機敏さが武器となるだろう。ラス氏は「複雑な環境の中で、どんな新しい情報が得られるかを見てみたい」と語る。この魚は、魚群を混乱させたり驚かせたりすることなく、実際の魚群を観察できるかもしれない。さらに、同様のシステムには、より明白な商業的用途もある。「パイプ検査について言えば、パイプの外側だけでなく、内側にも行く可能性があります」と、MIT大学院生でフィッシュボットの論文の筆頭著者であるアンドリュー・マルケーゼ氏は言う。「魚のような移動能力があれば、従来のプロペラに制限されません。ですから、油や粘性のある媒体の中を泳ぐことも可能です。」
しかし、油や水の中で最終的にどのような役割を果たすにせよ、魚の尾は陸上でより大きな可能性を秘めている。フィッシュボットの開発に加え、マルケーゼ氏とMITチームの他のメンバーは、連結されたセグメントが魚の尾によく似ており、膨らんだり縮んだりする曲線を描くソフトロボットアームの開発にも取り組んでいる。フィッシュボットと同様に、この触手は3Dプリントされた型にゴムを流し込むことで、標準的なモーター駆動ロボットよりもはるかに簡単に製造できる。「ネジやボルトを取り付けたり、精密に機械加工したりすることに時間を費やす必要はありません」とマルケーゼ氏は語る。「設計が安定し、型ができたら、ロボットを鋳造するのです。」
インフレータブル触手の詳細は、5月に発表される関連論文まで待たなければなりません。当初のデバイスは比較的シンプルで、2次元的に曲がっていますが、このアプローチは、モーターを使わなくても性能を犠牲にすることなく、人間と一緒に働くソフトロボットの開発に不可欠なものになる可能性があります。「バクスターには安全を確保するソフトウェアメカニズムが搭載されています」とマルケーゼ氏は述べ、リシンク・ロボティクス社のヒューマノイド作業員と、人間が近づくと動きを止める機能について語りました。「私たちのバクスターは、設計自体に安全性が組み込まれています。」
もう一つの可能性は、ガスを充填した高性能な触手です。同様に軽量で柔らかいロボットにこの触手を接続すれば、システム全体を動かしたり、物体を操作したりすることができます。「タコを作ることもできます」とラス氏は言います。
