進化を研究する方法はいくつかあります。孤立した人口で淡水もない小さな島で、テントを張って何ヶ月も暮らすこともできます。あるいは、コンピューターモデルとリスサイズのロボットをプログラムし、自分の研究室で千世代にわたる性と死を再現することもできます。
沖縄科学技術大学院大学の2人の研究者は最近、後者の選択肢を選びました。彼らはモデルとロボットを用いて、1つの集団の中で2つの異なる交配戦略がどのように生じるかを実証しました。一見すると、「適者生存」によって最終的に最適な戦略が1つ生まれると思われるかもしれません。しかし、もちろん、必ずしもそうとは限りません。特定の動物種の中でも、個体によって異なる交配戦略を採用することが知られています。例えば、北米マンボウを例に挙げましょう。マンボウのオスの中には巣を作って子育てをする個体もいれば、巣を作らずに他のオスの卵を受精させ、自分の子育てを他のオスに任せる個体もいます。なんとも卑劣なことです。
沖縄の研究者たちが行ったいくつかの実験では、最も適応度の高い集団は実際に一つの答えに収束しました。しかし、別の実験では、2つの異なる交配戦略を持つ小型ロボットが3対1の割合で存在する、多様な集団が生まれました。同じ問いに答える方法はたくさんあるようです。
では、沖縄の進化研究所でロボットが生き残るためには何をしなければならないのでしょうか?まずは、ロボットたちが何を使って作業していたのか見てみましょう。
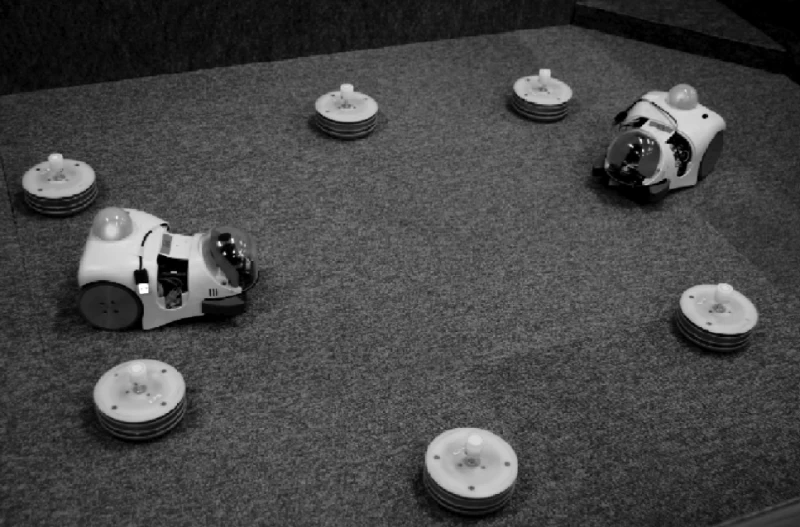
研究者たちは、これらの小型ロボットを、丸い電池(いわゆる「食料源」)が点在する床面に置き、そこで充電できるようにした。また、ロボットが様々な要因に基づいて判断を下すようにプログラムした。例えば、ロボットのエネルギー残量、最も近い電池までの距離、他のロボットの最も近い顔やテールランプまでの距離などだ。(ロボットは顔を合わせて交尾する。)
各ロボットは、いつでも餌を探し、交尾を待ち、あるいは他のロボットと交尾する選択をすることができました。交尾後に各ロボットが生み出す子孫の数は、交尾時のエネルギー量に依存していました。また、ロボットは餌や愛情の好みも受け継いでいました。ちなみに、これらのロボットは実質的に両性具有であり、どのロボットとも交尾することができ、一度出会っただけで子孫を残すことができました。
1,000 世代を経て、最終的なロボットの集団には Eater と Lover の組み合わせがいくつか存在しました。
研究者たちはまず4台のロボットを用いて実験を行いました。その後、物理的なロボットで1,000世代にわたる生と死を研究するのは「不可能」であると判断したため、コンピュータープログラムを用いて仮想的にさらなる実験を行いました(ブー!)。
1,000世代にわたる実験を経て、研究者たちは最終的な集団が、例えば「食べる人」と「恋人」の組み合わせを持つことを発見しました。「食べる人」は配偶者の到着を待つことはありません。他のロボットの顔が見えない限り(まあ、もし彼がすぐそこに私を待っているなら…)、常に充電を選択します。恋人は状況に応じて配偶者を待つことがありました。実験の結果、主に「食べる人」で構成される集団と、主に「恋人」で構成される集団が生まれました。しかし、最も適応度の高い集団の中には、「恋人」と「食べる人」の比率が3対1の集団もありました。適応度の高い集団の中には、「恋人」のサブカテゴリーが存在し、中には他のものよりも配偶者への傾向が強いものもありました。
この研究は、ロボットが進化研究のツールとして利用可能であることを示していると、研究者らはPLOS ONE誌に掲載された論文で述べている。彼らが次に取り組むのは、ロボットを雄と雌にプログラムすること、つまり交尾のたびに異なるリスクとコストを負うようにすることだ。
