メリーランド大学マイクロロボティクス研究所所長で機械工学教授のサラ・バーグブライター氏に小型ロボットと橋の関係について尋ねると、彼女はおそらくオーストラリアのシドニーにあるハーバーブリッジを人々が登るのを見た時のことを話すだろう。
「信じられない。リベットが平らじゃない。橋の下部構造の周りで何かが動くなんて、想像もできない」と彼女は言う。
しかし、UMDのヌーノ・マーティンズ教授とリチャード・ラ教授と共に、バーグブライター教授がまさにやらなければならないのは、まさにそれだ。しかし、彼らは、人々が橋をより簡単に乗り越えられるように、より優れたハーネスや奇妙な装置を考案しているわけではない。彼らは現在、全米科学財団から85万ドルの助成金を得て、3年間のプロジェクトを開始している。このプロジェクトでは、長さ数センチにも満たない小型ロボットの群れを設計、構築、配備する。これらのロボットは橋の上に登り、底面のリベットやボルトが絡み合った複雑な地形を横断し、人間のコントローラーからの最小限の入力で連携して、橋をよじ登っている間の橋の強度と安定性に関する画像や測定値を保存・送信することで、橋の点検を支援する。
「橋の周りを大量のロボットが走り回るという構想です」とベルクブライター氏は語る。「3年後には実現しないとは思いますが、どの程度まで商業化できるか判断できる段階には達していると思います。」

アメリカの橋の平均築年数は 42 年で、定期点検を行うには十分な年数です。現在、米国には約 605,000 の橋があり、その 1 つを点検するのは専門家のチームが何時間もかけて行う退屈な作業です。虫ほどの大きさのロボットを 50 台から 100 台、人間のチームと連携させて放つことで、橋の点検に必要な時間を短縮し、歩行者や車両の通行を遮断する必要を回避できます。アイデアとしては、これらのロボットに特定のコマンドを与えると自律的に動作し、橋の上を自力で動き回り、さまざまな表面を調べて測定するために協力する、というものです。このようなロボットの設計には、動的動作と接着の両面における創意工夫が求められますが、この 2 つは、2008 年に UMD のマイクロ ロボティクス ラボの設立に協力して以来、Bergbreiter 氏が研究してきた分野です。
「重要なのは、橋の表面にくっついて移動できることです。それがコンクリートでも、鋼鉄でも、塗装された鋼鉄でも構いません」と彼女は言う。ベルクブライター氏によると、研究室で研究されている接着技術は、スパイダーマン映画や『ミッション:インポッシブル』のトム・クルーズからインスピレーションを得ているという。電気接着を使用して橋にしがみつくロボット、またはハサミムシほどの大きさのロボットが小さな毛、つまり「ヤモリ接着」を使用してリベットに固定されている様子を想像してみてほしい。「そこで重要なのは、オンとオフの切り替えができることなのです」とベルクブライター氏は言う。尾や柔軟な背骨を追加すれば、橋にくっついて水平面から垂直面へ、そしてリベットのように平坦とはほど遠い構造物の上を簡単に移動するロボットの完成だ。ベルクブライター氏によると、新しい接着技術とさまざまな移動メカニズムを使用した小規模プロジェクトは、すでにUMDのマイクロロボティクスラボで実証されているという。
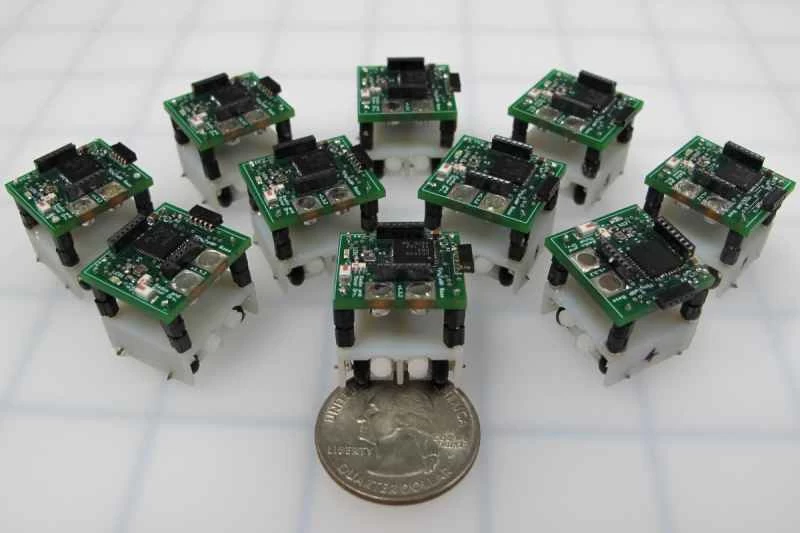
橋梁点検に役立つ情報の中継については、教授陣はマイクロロボティクス・ラボのTinyTerpsを活用するかもしれない。これは、UMDのマスコットであるテラピン(略してterp)にちなんで名付けられた25セント硬貨サイズのロボットで、小型のArduinoボードと考えることができる。「実質的には無線マイクロコントローラーを搭載しており、様々なセンサーを接続・取り外しできます」とベルグブライター氏は言う。
橋梁点検用の超小型ロボットがどのような外観になり、どのように機能するのかは、まだ明らかになっていない。しかし、ベルクブライター氏は、それがこの新しいプロジェクトの面白さの一部だと語る。
「私たちは1950年代後半から1960年代にかけて大型ロボットの開発に取り組んできました。この分野では素晴らしい成果が数多く生み出されてきました」と彼女は言う。しかし、皮肉っぽくこう付け加える。「底辺にはまだまだ余地があるんです」
