米海軍は今週、艦隊防衛用の新型自律ロボット船を発表して話題を呼んだが、中国は陸上で同様の戦略を実行できることを示している。

米軍はイラクとアフガニスタンでの作戦でiRobot PackbotやFoster Miller Talonなど12,000台以上の無人地上システムを配備してきたが、それらは遠隔操作され、ほとんどが小型である。唯一の大型車両タイプ、例えばBAE Black Knight軽戦車などは試験システムであり、配備されることはなかった。ラジコンのおもちゃとGoogle Carの違いと同様に、自律走行車は搭載センサーからのデータを使用し、人間の入力なしにオフロードや市街地を走行する点で、そのような遠隔操作システムとは異なる。装甲戦闘車両(AFV)のカテゴリーでは、アメリカの自律システムは国立ロボット工学センターのCrusherや陸軍研究所のXUVなどの技術実証車のみであり、既存のアメリカのAFVシャーシをベースにしたものではない。

対照的に、中国の自動運転AFVの突然の多様化は、既存の軍用プラットフォームをベースとしている点で前例のないものであり、本質的には現在の有人戦闘車両を将来の無人車両に変える可能性を示しています。ある自律型AFVは、多用途のZSD-63装軌式装甲兵員輸送車に基づいています。その有人バージョンは1960年代に人民解放軍で初めて配備され、対戦車ミサイル、迫撃砲、機関砲で武装してきました。ZSD-63の前面、乗員ハッチの周囲に搭載された3つのLIDAR、レーダー、ビデオカメラステーションは、Google Car(自動運転車を1台搭載)などの民間の無人車両とは対照的に、軍の自律車両は偵察や補給任務、そしておそらくは将来の戦闘や工兵任務を遂行するために、より多くのセンサーデータを必要とすることを示唆しています。

他の中国の自律走行車の中には、センサーが少ないものもあります。QLL-05 (?) 4X4偵察AFVは、後部座席に2つの白いセンサードームと、ヘッドライトのすぐ上のフロントバンパーに2台のビデオカメラを搭載しています。HMMVV Dongfeng EQ2050(アメリカンモーターズからライセンス生産!)は、乗員室と運転席が切り離され密閉されています。おそらく、ほとんどのセンサーは作戦中にトランクから飛び出すように設計されているのでしょう。最後に、未確認の空中AFVのシャーシには、バンパーに取り付けられたフロントカメラと中央のセンサーマストが搭載されています。


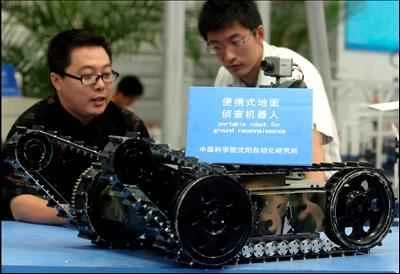
これらの装甲車両は遠隔操作用に改造されただけだった可能性もあるが、その可能性は低い。中国は既にiRobot Warriorに類似した地雷除去用の遠隔操作ロボットのプロトタイプを開発しているため、その確立された技術を様々な車両サイズの装甲車両に移植することのメリットは疑問視されている。また、最もシンプルな遠隔操作地上車両は、通常、LIDARやレーダーセンサーではなく、ビデオカメラのみを搭載している。

米軍の計画と同様に、中国はまず、地雷除去、偵察、補給任務に自律走行地上車両を使用する可能性が高い。法律上および政策上の問題に加え、現在の AI の限界を考えると、今のところはいかなる兵器も人間の許可が必要になる可能性が高い。
Sinodefence ForumのAssassinsMaceに感謝します。
あなたは興味があるかもしれません:
兵器化された「カニ歩き」ロボットは中国の地上戦争の未来か?
中国独自の大型犬型ロボット「大犬」
世界最大の「対テロ」演習に中国のドローン、ロシア軍、そしてウクライナ風の軍事演習が登場
サメではなくロボット:中国の大学が長距離無人小型潜水艦を試験