いつか自動運転車に乗りたいと考えているなら、その移動は都市部で行われる可能性が高いでしょう。自動運転車での一般向け移動サービスを提供する際、WaymoやDrive.aiといった企業は、それぞれアリゾナ州フェニックスやテキサス州フリスコといった地域を選んでいます。これらの地域には、未来の車に乗り込み、ある地点から別の地点まで移動したいと考える人がたくさんいるからです。また、ゼネラルモーターズ傘下のCruiseは、来年、米国の主要都市で自動運転タクシーサービスを提供する予定です。
しかし、自動運転車を田舎道で走らせるとどうなるでしょうか。田舎道とは、草や木などの自然物が近くにあるだけのアスファルト路面で、車両が参照できる詳細な 3 次元地図がない道路です。
MITの研究者たちはこの問題に取り組んでおり、彼らの戦略には車に人間のように運転することを教えることが含まれています。
MITチームが作業していた地域はマサチューセッツ州デボンで、当時は詳細な地図がありませんでした。Googleマップのような地図アプリがスマートフォンに表示される様子を想像してみてください。地形図と呼ばれるこの種の地図は、「どの道路がどの道路とつながっているか、そしてそれらの形状がおおよそどのようなものかを示す線分だけを示すものです」と、MITでロボット工学とその知覚システムを研究し、農村部における自動運転研究の主任研究者を務める博士課程のテディ・オート氏は言います。「この種の地図と、都市部の自動運転車が使う地図には大きな違いがあります。」
詳細な地図があれば、自動運転車は街中の現在地、縁石の位置、そして一時停止標識など、前方に何があるのかを正確に把握できます。例えば、テキサス州フリスコで実施されたDrive.aiのプロジェクトでは、当初は人間が操縦していましたが、その後、自動運転に必要な3次元の高解像度地図をセンサーを使って作成しました。
「都市部では、これは優れた信頼性の高いソリューションです」とオルト氏は言う。しかし、彼らは都市部で作業していたわけではない。「都市マッピング用のソリューションは、国土の大部分にはうまく拡張できないのです」(木々や低木が絶えず成長していることも、問題となっている)。
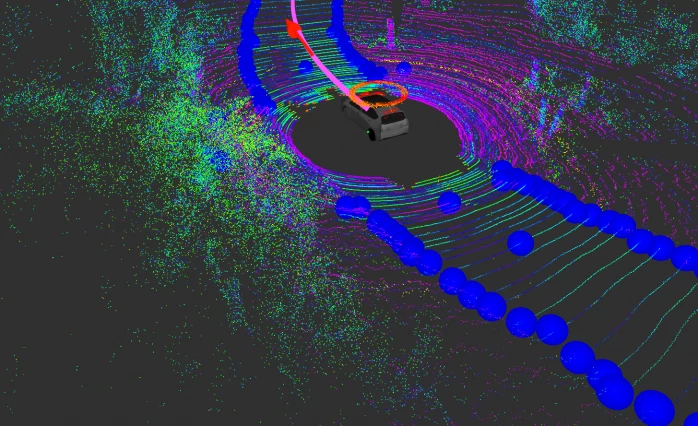
そこで研究チームは、詳細な地図なしで走行するというアプローチを採用しました。研究車両に搭載されたLiDARセンサー(自動運転車に広く搭載されている機器)を用いて、アスファルトと両側の芝生の質感の違いを検知しました。LiDARユニットは、1秒間に10回回転する64個のレーザーで構成されています。この機器は、レーザー光が周囲に反射し、車両に周囲の状況を知らせることで機能します。
レーザーシステムは「周囲の地形を把握している」とオルト氏は言う。道路は平坦だが、その隣にある草や低木、葉などは平坦ではない。
こうして車は前方の道路の位置を認識したが、シリコン脳に高性能な3D地図がなくても(GPSは搭載していたものの)、目的地までどうやって運転すればいいのかを知る必要があった。そのために、車は「ローカルゴール」、つまり車が見通せる前方の道路上の地点を選び、そこに向かって運転した。しかし、ただその地点まで運転して停止するだけではない。車は、大きく平坦な湖の水平線上の一点に向かって漕ぎ進むように、目的地に近づくにつれて常にその情報をアップデートしていくのだ。
「ローカル目標は、実際には車両が見える限り先まで常に更新されています」とオルト氏は述べ、1秒間に5回更新されていると指摘した。ローカル目標の更新速度が速いほど、より速く移動できるため、1秒間に5回更新すれば時速55マイル(約80キロメートル)で移動できることになる。ただし、MITチームの速度はそこまで速くなかった。
ローカルゴールを馬の頭の前に吊るされたニンジンと考えてください。
「これは実は人間の運転とかなり似ています」とオルト氏は指摘する。人は最終目的地を念頭に置いているかもしれないが、実際に道路上で車を操縦するときは、ただ前を見て、目の前に見える常に変化する地点に向かって運転しているだけだろう。
最終的に、彼はこの技術が「自動運転車を都市から排除する」一つの方法だと考えている。
カーネギーメロン大学ロボティクス研究所の主任プロジェクト科学者であるクリストフ・メルツ氏も、この考え方に賛同しています。地方は「放置されてしまう可能性がある」と彼は言います。「もしこれらの自動運転車が地方で走らなければ、誰も運転できないため、高齢者は家に閉じ込められてしまうかもしれません。」

