ロボットに積極的な機動性を持たせたいなら、小型化が不可欠です。小型化すると、「慣性モーメント」(角運動に対する抵抗)が劇的に低下します。当社のナノクアドローターロボットは、可能な限り軽量化を図り、重さは5分の1ポンド未満、手のひらサイズに設計されています。
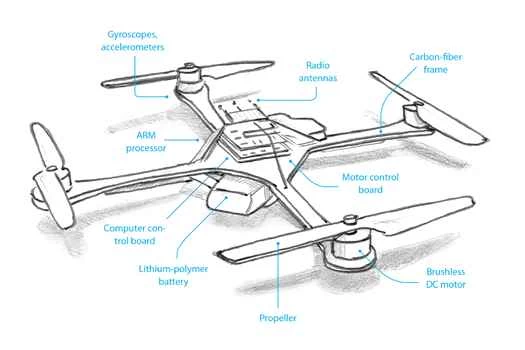
ロボットは半秒で空中バック宙をし、2Gで加速し、ローターブレードからローターブレードへと3次元編隊飛行することができる。しかも、これらはすべて自律的に行う。我々はロボットにどこへ行くかは指示できるが、どのように行くかは指示できない。各ロボットは、研究室の天井に設置されたモーションキャプチャカメラのネットワークと通信する。カメラはコンピューターに接続され、ロボットと周囲のロボットの位置を計算する。これはGPSのようなものだが、情報は1秒あたり100回、1センチメートル未満の精度で更新される。ロボットには、角速度を測定するセンサー、エアバッグの展開タイミングを指示するものと同様の加速度計、プロペラを駆動するモーター、そしてモーターとバッテリーを制御する回路も搭載されている。
飛行ロボットにとっての大きな数学的課題は、X、Y、Z、ピッチ、ヨー、ロールの6次元で移動させることです。私たちは研究室で3Dの障害物コース(窓、ドア、柱にテープで貼ったフラフープなど)を作り、ロボットにそこを飛行させます。まるでハリー・ポッターのクィディッチの試合のようです。また、仙台の地震で被害を受けた建物で、より大型のロボットをテストしました。私たちがこれらのロボットの主な用途として想定しているのは、捜索救助です。
—ビジェイ・クマールはペンシルベニア大学の機械工学教授です。ナノクアドローターは現在、同大学の研究室からスピンオフしたKMel Roboticsによって製造されています。
