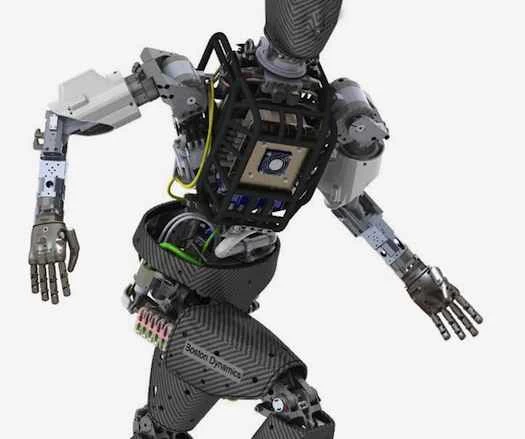

史上最も野心的なロボットコンテストであるDARPAロボティクスチャレンジ(DRC)が、昨日、重要な節目を迎えました。国防総省の研究部門がバーチャル・ロボティクス・チャレンジの結果を発表しました。5日間にわたる予選イベントで、世界中から集まった26チームがヒューマノイドロボットを操作し、消防ホースの持ち上げ、取り付け、作動など、人間の介入をほとんど、あるいは全く必要としない、驚くほど難しいタスクを遂行させました。7チームが勝ち上がり、資金と、政府提供のロボット(ボストン・ダイナミクス社製、身長5フィート10インチ、体重240ポンドのアトラス)をDRCの次のフェーズで使用する権利を獲得しました。
もちろん、注意すべき点は、バーチャル・ロボティクス・チャレンジは完全にシミュレーションプログラム内で行われたということです。これは実質的に、今年12月に開催される最初の実戦に向けたオーディションのようなもので、優勝した7チームと、それぞれのアトラスロボットは、より多様なチーム製作ロボットの群れに加わります。そのグループで最高得点を獲得したチームは、2014年12月に予定されている、賞金200万ドルをかけたもう一つのマルチタスク障害物レース、最終決戦に挑みます。
DRCはロボット工学全体、特に人間の環境や道具をナビゲートし、ひょっとすると私たちの命を救うかもしれないロボットの誕生という点で、画期的な出来事となる可能性を秘めています。しかし、このコンテストのバーチャル部門では、既に大きな可能性を秘めたツールが誕生しています。DARPAが資金提供し、すべてのDRCチームに提供され、今回の予選でも使用されたシミュレーションソフトウェア「Gazebo」は、現在公開中です。誰でも無料でダウンロードできます(現時点ではLinux/Ubuntu版のみですが、OSX版とWindows版もリリース予定です)。
さらにすごいことに、地球上で最も先進的なヒューマノイド ロボットの 1 つである Atlas の詳細な仮想モデルや、6 月 17 日から 21 日にかけて行われた最近のイベントで使用されたアリーナや課題もダウンロードできます。これらのチームがアクセスできたすべての情報、つまり、実用車をコース上で運転するために仮想 Atlas が乗り込まなければならなかった座席の寸法や柔軟性から、ロボットがハンドルを握るときの手の摩擦特性まで、克服しなければならなかったすべての情報が、完全に利用可能です。
GazeboはDRCよりも古く、オープンソース・ロボティクス財団のCTO、ネイト・ケーニグ氏がサイドプロジェクトと呼ぶものです。これは、個々のロボット研究室が独自の研究のために、システムが対処しなければならない環境やシステム自体をモデル化するために開発するシミュレーターに似ていました。しかしケーニグ氏によると、昨年DARPAから打診があり、DRCで使用するためのシミュレーターを提供するだけでなく、Gazeboを全世界で利用可能なシミュレーターに改造してほしいと依頼されたそうです。「彼らはシミュレーターの費用を前払いして、それで終わりにしてしまうのは望んでいませんでした」とケーニグ氏は言います。「私たちは既に、DRCの範疇を超えたシミュレーター用の機能を開発しています。建物の簡単なモデリングやロボットのGUI(グラフィカルユーザーインターフェース)など、すべてDARPAの資金援助を受けています。彼らはこのシミュレーターが、ロボット工学を誰もが利用できるようにするという点で、ゲームチェンジャーになると考えています。」
このシミュレーターは、ロボット工学を誰もが利用できるようにする画期的なものです。DARPAは、オープンソースロボティクス財団(OSRF)に3年間で600万ドルの資金を提供しました。ケーニッヒ氏はこの資金で、10人のフルタイムプログラマーを任命し、Gazeboの全面的な改修と拡張を行いました。このシミュレーションソフトウェアは、過去1年間で飛躍的に詳細化され、センサーの性能から負荷がかかった関節の破損点まで、あらゆるものをモデル化して判定できるようになりました。Gazeboの最も優れた機能の1つは、シミュレーター内、つまり仮想ロボット内で設定した制御アルゴリズムを、現実世界の対応するロボットに即座に送信できること(およびその逆)です。つまり、プログラム内でロボットに梯子を登らせる方法を決定したら、そのコードを物理システムに挿入して、ロボットが動くのを見ることができます。 OSRF の DRC への関与は事実上終了しましたが、Gazebo の開発には今後 1 年半にわたって資金提供が継続され、既存の機能の改良と新しい機能の追加が行われます。
DARPAとOSRFの両機関によると、Gazeboの最終的な目標は、研究室間で結果を比較しコードを共有できるようにするだけでなく、ロボット工学の研究開発への参入障壁を下げることです。この点において、Gazeboはクラウドコンピューティング資産(シミュレーターの計算の大部分を処理するために、ほとんどの場合レンタルされるオフサイトコンピューター)と連携するように特別に設計されています。DARPAはVirtual Robotics Challengeチームにクラウド資産へのアクセスを提供しましたが、ケーニッヒ氏は、同等のリソースをAmazonから1時間あたり数ドルでレンタルできると指摘しています。これは、強力なコンピューターを直接購入するよりもはるかに安価な選択肢です。「クラウドシミュレーションが実現した今、高校の教師や中小企業など、誰もが低コストでロボット工学を利用できるようにするというアイデアが現実のものとなりました。」

実際、GazeboがDRCの唯一の実体的成果となる可能性は十分にあります。DARPA初のロボットカーレースである2004年のグランドチャレンジは、予選時間内に自動運転車両が一台もフィニッシュラインを通過できず、自律走行車としては悲鳴のような結果に終わりました。その後のチャレンジはより実りあるものとなりましたが、DRCの課題(コードレス電動工具で壁を切る作業も含む)は、世界最高のロボットチームにとっても難しすぎる可能性があります。しかし、最悪のシナリオであっても、DARPAとDRCは、分野全体を一つにまとめる可能性を秘めた、無料で強力なツールを生み出すことになるでしょう。