

杖の中に住み、あなたの心の願いを読み取ったり、あなたの血管を通ってあなたの心の中に入り込んだりするロボット。
これらは、人間と共に、時には人間の体内で働くロボット、つまりコロボットの開発を推進することを目的とした連邦政府のプログラムである国家ロボティクス・イニシアチブ(National Robotics Initiative)が現在資金提供している研究プロジェクトのほんの一部に過ぎません。3年目を迎えたこのイニシアチブの第2回目の資金提供では、全米各地の数十の新規プロジェクトに3,800万ドルが交付されました。資金の大部分は国立科学財団(NSF)からのもので、同財団は今後3年間で30の新規プロジェクトに3,100万ドルを交付する予定ですが、残りの700万ドルはNASA、国立衛生研究所(NIH)、国立科学財団(NSF)、そして米国農務省(USDA)から提供されます。
これまでのところ、国家ロボット工学イニシアチブ(NRI)の特徴は、協働ロボットへの重点ではなく、これほど広範囲にわたる複数機関による取り組みがほとんど注目されていないことです。NRIは、協働ロボットのビジョン全体を体現する単一の象徴的なロボットシステムやコンセプトではなく、関連性の薄いアイデアの寄せ集めであり、写真映えしたり、クリックベイトになるほど不吉なものはほとんどありません。しかし、この研究は詳しく見る価値があります。なぜなら、私たちが生きている間に私たちの生活の一部となる可能性のあるロボットは、ボストン・ダイナミクスのアトラスやNASA(およびGM)のロボノート2のような姿ではないからです。おそらく、たくさんの部品がボルトで固定された杖のような姿をしているでしょう。
ロボットたち
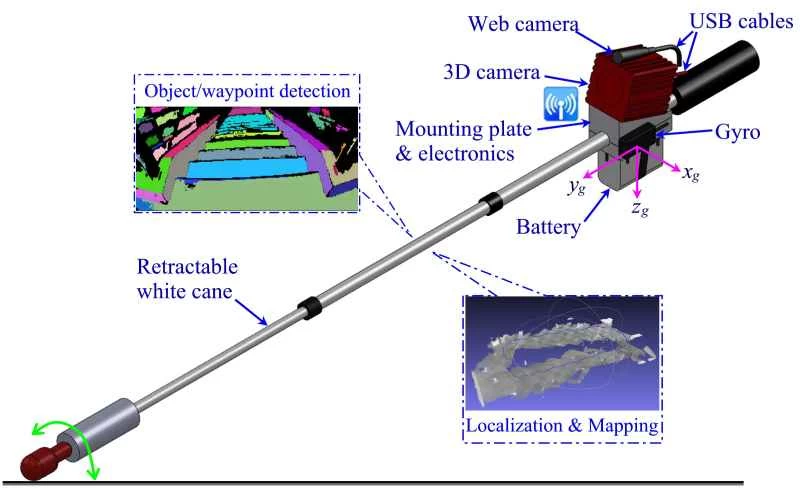
アーカンソー大学リトルロック校が開発中のロボット杖は、ナビゲーションエイドと呼ばれていますが、実際には盲導杖のような役割を果たします。視覚と3Dカメラでユーザーの進路をマッピングし、階段や低い張り出し部分など、視覚障害者にとって興味深い特徴を検知します。このロボットは、Bluetoothイヤホンを通して(場合によっては触覚フィードバックを通して)操作者に音声で警告や指示を出すことができるだけでなく、限定的な操縦操作も実行できます。「ナビゲーションエイドモードでは、デバイスのローラー先端が作動し、杖を操作して目的の進行方向に向けます」と、アーカンソー大学リトルロック校のロボット工学者で、ロボット杖プロジェクトの主任研究者であるCang Ye氏は述べています。6自由度ローラーは操作者を操作するのではなく、指示を出すもので、ナビゲーションエイドモードと白杖モードを切り替えることでオンとオフを切り替えることができます。
このプロジェクトは馴染みのある領域を扱っているように思えるかもしれない。iRobotのような企業が設計したロボットは、既に屋内で衝突を最小限に抑えて自律走行できる。しかし、障害物の検知と回避という課題は、まだ解決には程遠い。ロボット杖の故障許容範囲は極めて小さくする必要があり、その精度レベルは、人間に装着されていないシステムにも役立つ可能性がある。イェ氏は、この杖の中核技術が、他のロボットが自律的に物体を移動・操作する能力を向上させる可能性があると考えている。NRIの下でどれほど多くの組織(および頭字語)が協力しているかを示す例として、この共同ロボット杖は、NIH傘下の国立生物医学画像・生物工学研究所(NIBIB)と国立眼研究所(NEI)によって3年間共同出資された。
こうしたロボットが障害者の生活にもたらすであろう重大な影響を無視し、サイバネティック・ゴルフクラブ、自動操縦の日本刀、その他気の利いた拡張現実のシナリオに早送りしたくなるかもしれない。しかし、このロボット杖は、私たちが最も多く接することになるロボットの深遠な側面を象徴している。協働ロボットは、私たちと共に転がり、のんびり歩くのではなく、私たちが扱う物体に住み込み、必要に応じて感知し、支援するようになるかもしれない。デバイス間の無線通信が普及しつつあるように、自転車、メス、銃など、ロボットが持っていないという概念は、いつか滑稽なほど古風なものに思えるようになるかもしれない。
この種の協働ロボットのもう一つの例は、クリーブランドのケース・ウェスタン・リザーブ大学が開発し、国立血管外科研究所(NIBIB)の資金提供を受けているロボットカテーテルです。この善意から生まれた小さなホラーショーは、MRI検査中に静脈内を移動し、患者の心臓の一部を焼灼するように設計されています。恐ろしく聞こえるかもしれませんが、このシステムは、心房細動アブレーションと呼ばれる不整脈に対する既存の治療法に自律性を追加するだけです。心房細動アブレーションでは、電極先端のカテーテルを手動で心臓まで誘導し、特定の組織を焼灼します。この恐ろしい移動中の患者の心臓と血液の動きを補正することで(MRIの画像データに基づいて誘導されます)、ロボットは必要悪であるこの処置をはるかに効率的に行うことができます。
機械の思いやりは共有
しかし、既存デバイスのロボット化は、NRI関連の幅広い分野が示唆するように、コロボットの未来における一つの形に過ぎません。NSFが資金提供する新たなプロジェクトの一つは、パーキンソン病患者、特に顔面が重度に麻痺した患者の感情的ニーズをよりよく読み取ることができるロボットの開発です。「フェイシャルマスキング」の被害者とその介護者の間の仲介役として機能するため、このプロジェクトは「道徳的感情制御メカニズム、抽象的な道徳的推論、そして心の理論を備えたロボットアーキテクチャを開発し、コロボットが人間の感情的および倫理的要求に敏感に対応できるようにする」ことを目指しています。
実際のロボットの正確な性質、例えば既存のシステムになるのか、それとも新しいシステムになるのかは不明ですが、このプロジェクトの協力者の一人がジョージア工科大学のロン・アーキン氏であることは注目に値します。彼は、自律型軍用ロボットにいわゆる「倫理的ガバナー」の導入を提案した、著名な(あるいは悪名高い、見方によっては)ロボット工学者です。目的が残虐行為の回避であれ、人間のニーズを処理して対応することであれ、アーキン氏の研究はしばしばロボットに道徳性を吹き込む可能性に焦点を当てています。
もしあなたが神経質なタイプで、ロボットの反乱が間近に迫っているという妄想を抑えられないなら、アーキンはロボポカリプスの先駆者か、あるいは人類の救済を企む人物のどちらかでしょう。あるいは、倫理的な機械というアイデアにただ惹かれるロボット工学者かもしれません。コ・ロボティクス研究が実現を目指す、人間とロボットの持続的なチームワークの実現度合いを考えると、これはNRIが資金提供するアイデアの中で最高のものになるかもしれません。
