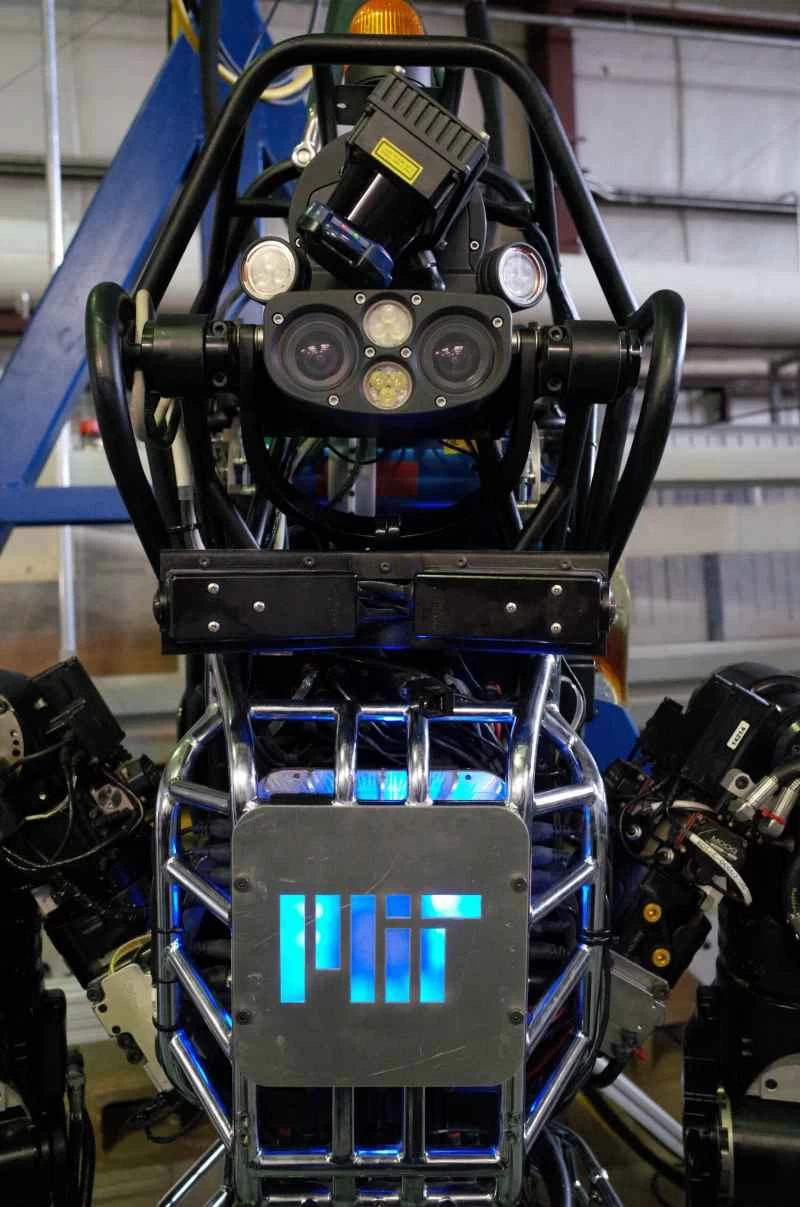
身長180cm、体重145kgの人型ロボットが転倒しても、誰も驚きません。それは、アトラスがいつもそうしているからです。DARPAロボティクスチャレンジに出場する他のチームに貸し出された、ほぼ同一のアトラスモデルや、過去にカメラの前で転倒したロボットたちと同様に、このロボットも転倒する傾向があります。実際、MITのCSAIL(コンピュータ科学・人工知能研究所)の研究者たちは、このロボットが転倒するタイミングを正確に予測していました。それは、アトラスが力強く歩き始めて3歩の地点でした。そして、その予想通り、アトラスは一歩、一歩、そしてまた一歩と、コンクリートの床に顔面から落ちそうになったところを、頭蓋骨の役割を果たすロールケージに取り付けられたケーブルによって救出されました。
これらはどれも目新しいことではない。ヒューマノイドロボットは、ほとんどの人間が楽々と直立姿勢を保っているような動的なバランス感覚と絶え間ない微細な調整を模倣するのに苦労する、扱いにくい機械として悪名高い。興味深いのは、このバージョンのアトラスがなぜこれほど早く制御不能に陥るのかということだ。
メディア向けのデモンストレーションの冒頭で、CSAILの博士研究員スコット・クインデルスマ氏は、この問題は「コード内のバグ」のせいだと述べた。これは、アトラスのメーカーであるGoogleが買収したボストン・ダイナミクスが提供したコードをすべて取り除き、ロボットにまったく新しい制御アルゴリズムを注入するというチームの努力による不可解な副作用だ。
しかし、このアトラスを転倒させているのはソフトウェアではありません。ロボットの手です。地球上で最も洗練されたロボットの一つが、自らの3本指グリッパーの限界重量を計算できずに、何度も転倒しているのです。
ヒューマノイド ロボットがなぜこれほどまでに魅力的であるのか、そして現実世界での使用にまったく準備が整っていないのかをこれほど簡潔に表す例を見つけるのは難しいでしょう。
アトラスのすごいところは、二足歩行で何でもできるという点です。Amazon、Facebook、Googleが相次いでロボット工学の研究開発に巨額の投資を行っていることから、ロボット工学の研究開発は爆発的に進んでいるように見えますが、ヒューマノイドシステムの成功は他のヒューマノイドロボットと比較されます。昨年12月に行われたコンゴ民主共和国(DRC)初の実技試験で上位8チームのうち5チームがアトラスを使用していました(CSAILは3位)。アトラスは災害対応をテーマにした一連のタスクを力強くこなし、油圧駆動は競合の電動モーターのほとんどを凌駕しました。他の多くのロボットと比べても、アトラスは流体圧をものともしない優雅さで、まるで人工物でプロアスリートのようでした。
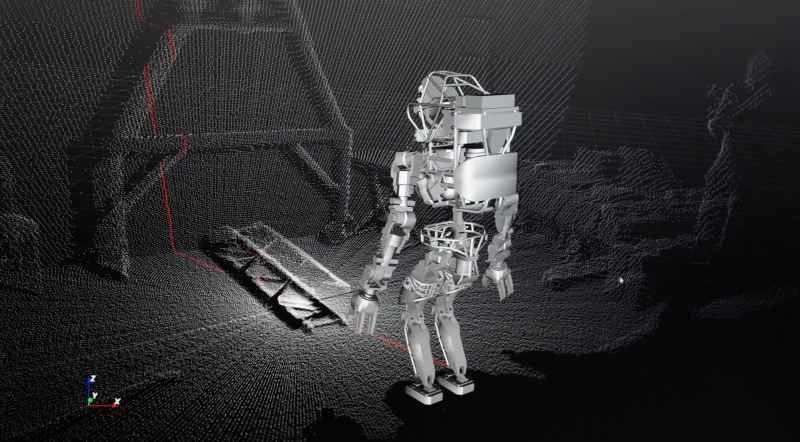
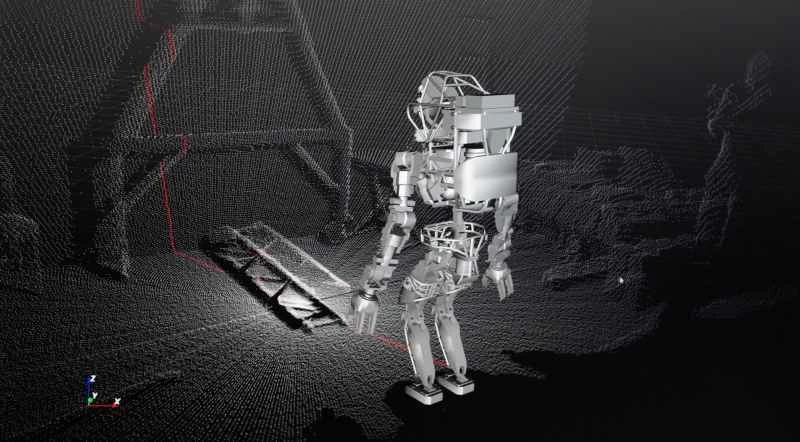
しかし、ほとんどの人間と比べると、アトラスはかろうじて動ける程度の状態だ。MITでの同じデモでは、2×4材を1本拾うのに、数分おきに何度も試行錯誤が必要だった。板までは問題なく歩いたものの、あまりにもゆっくりと慎重に歩いたため、改造されたガレージを横切るこのよろよろとしたロボットを助けたいという衝動を抑えなければならなかった(重量挙げ選手のような堂々とした体躯と回転する警告灯にもかかわらず)。ロボットが板に着くと、ロボットの身体的な意図を監視していた研究者(画面上のインターフェースは魅惑的で、アトラスとその周囲の詳細な3Dモデルと、アトラスが踏み込む場所や到達する場所を色分けして表示する)が介入し、自分の体にぶつからないようにもう一方の手を使うように指示しなければならなかった。もしアトラスが人間だったら、車椅子に乗り、住み込みの看護師に世話をされているだろう。(注:以下のビデオは短いが、それほど面白くはない。)

そして、これはあの厄介な手を考慮していない。アトラスが安全テザーの上で揺れている時、誰かが「手だ!」と言った。研究者たちは近くのコンピューターモニターの前に集まり、勝ち誇ったように別れを告げた。クインデルスマの説明によると、このロボットは当初、競技会に送られた際に切断された状態で出荷された。チームには、iRobot製のモデルを含む汎用ハンドの選択肢が2つ提供された。MITはそれらと他の選択肢を検討し、最終的に既存の3本指マニピュレーターにカメラと触覚センサーを取り付けることで、独自の把持機構と感知機構を組み合わせたものに落ち着いた。アトラスはまだ切断された状態だと考えているようで、強化されたハンドの重量は考慮していない。
これらの改良は、私には完全に合法とは思えません。予選通過チームにアトラスを提供する目的は、ベースラインとなるハードウェアを提供し、制御ソフトウェアの開発に集中してもらうことでした。センサーの追加は、ハードウェアの大幅な変更に当たるのではないでしょうか?
クインデルスマ氏によると、DARPAはチームに対し、手首から下の部分について、アトラスに必要に応じてコンポーネントを追加することを許可しているという。CSAILはセンサー機能を強化したことで、意図せずして安定性のバグを生み出してしまった。手の重量バランスの調整はおそらく深刻な問題にはならないだろうが、ボストン・ダイナミクスが全アトラスに搭載されている巨大で扱いにくい動力・油圧テザーをバッテリーパックに交換した際に重量配分が変わるなど、他のバグは必ず発生するだろう。このバッテリーパック交換は、事実上ロボットの電源を初めて切断することになる(これらのオーバーホールは6ヶ月以内に完了する予定だ)。
まだこれを読んでいるなら、おめでとうございます。あなたは明らかにロボット工学が好きなようですね。ロボット自体は素晴らしく、くねくねと動き、素敵な動画やGIFを作ることができますが、ロボット工学の魅力は必ずしも最終的に作られる機械にあるわけではありません。ロボット工学とはトラブルシューティングです。ロボット工学は容赦なく、そして困難ですが、ヒューマノイドロボットはおそらく最も困難で残酷です。アトラスのようなロボットは、今後何年、あるいは何十年も機能不全に陥るかもしれません。それでも構いません。難易度の高さ、そして最高のヒューマノイドでさえも弱小な弱者であるという事実こそが、彼らを応援したくなる理由なのです。

