1950 年代後半、アメリカ海軍は恐ろしく複雑な問題を抱えていました。潜水艦発射の大陸間核弾道ミサイルの目的地をどうやって伝えるか、ということです。
発射位置が固定されているという利点がある地上発射型ミサイルと異なり、潜水艦ミサイルは発射港から何千マイルも離れた場所からでも、さらに厄介なことには水中からでも、いつでも発射命令を出すことができる。
このサービスは、設立されたばかりの政府の未来志向組織である国防高等研究計画局(DARPA)と連携し、海底から発射されたポラリスミサイルの位置を知らせる、全地球測位システム以前の衛星群を作成した。
(海軍は当初、水上艦から発射される初期の巡航ミサイルに核弾頭を搭載することを望んでいたが、後にそれは最善のアイデアではないと判断し、事業を潜水艦に移行した)。
ミサイルにはすでにジャイロスコープと加速度計の複雑な組み合わせが取り付けられており、ミサイルの位置をかなり正確に把握できる慣性誘導システムが搭載されていた。
(私は2009年に北ロンドンのデッカ・レーダー工場を見学した際に、現代のトライデントミサイルの慣性誘導システムを見ました。それは私が今まで見た中で最も分かりにくくアナログな電子機器でした)。
大量のセンサーは、ペーパークリップ作戦(第二次世界大戦後、NASAの前身となる組織の初期の基盤を形成した元ドイツ人ロケット科学者の大量採用)に対するアメリカの防衛策の産物だった。

MITの伝説的人物であるチャールズ・スターク・ドレイパーが率いた開発で、アメリカの科学者たちは宇宙開発競争のための慣性誘導を開発しました(これはアポロ計画の誘導システムにつながりました)が、その潜水艦への応用はすぐに注目されました。
慣性航法は非常に優れていますが、完璧ではありません。
潜水艦が水中を移動するとき、ジャイロと加速度計が速度と方向の変化を測定するため、測定値にある程度の不正確さが生じました。
(慣性誘導に関する難解なジョークを一つ。飛行機は自分がどこにいないか(ある程度は)分かっており、また、どこにいたかも分かっています。そこで、飛行機は自分がどこにいないかからあるべき場所を、また、どこにいなかったかからあるべき場所を減算し(あるいはその逆)、その差を、あるべきでない場所とかつてあった場所の積と積分します。こうして、偏差と変化の差、つまり「誤差」と呼ばれる定数が得られます。)
潜水艦が位置を追跡する方法は他にもあり、LORAN C(最近終了した無線三角測量サービス)などの無線位置特定サービスや、海底の深さを読み取り、それを一連の海図と比較する方法などがありました。
しかし、トランジット衛星群は、ロランCとは異なり、海岸施設から遠く離れた外洋でも利用可能でした。
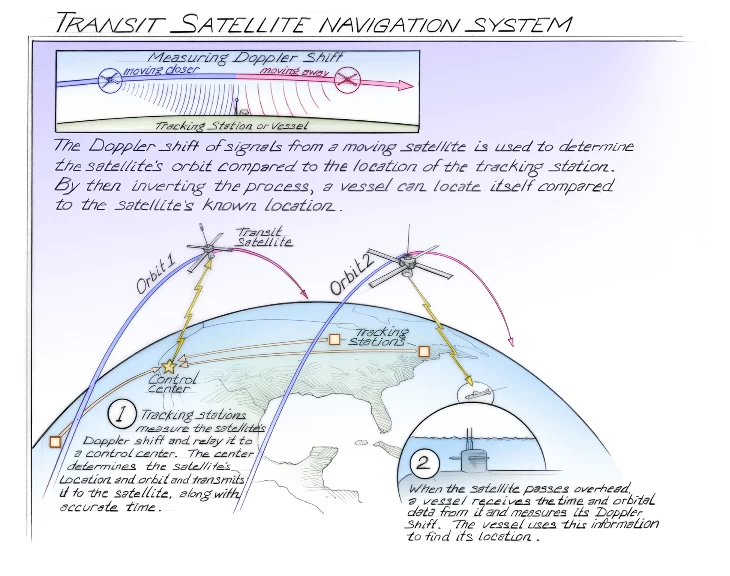
単一の衛星が頭上を通過すると、船舶に位置データが提供され、航海士は信号のドップラー効果の変化を使用して船舶の位置を計算します。
「計算は複雑かつ広範囲にわたるため、小型のデジタル コンピュータが必要です」と、1970 年代の民間用マグナボックス TRANSIT ロケーターのマニュアルには記されています。
海軍は、衛星の読み取り計算を行うために、AN/UYK-1 という特殊な初期コンピューターを開発しました。
潜水艦の航海士にとって、それは、万が一世界規模の熱核戦争が起こりミサイルを発射する必要がある場合に備えて、潜望鏡深度まで素早く移動して潜航艇の慣性航法をリセットすることを意味した。
すべての情報は、2000年代までベビーブーマー世代に搭載されていた初の船上コンピューター航法システムのひとつである船の慣性航法システム(SINS)に入力された。
「トランジット衛星の位置特定には、潜望鏡深度まで潜り、特別なアンテナを上げなければなりませんでした。当時はロラン衛星の電波が常時受信できたため、トランジット衛星の位置特定はそれほど頻繁ではなく、3日に1回程度でした。潜望鏡深度にいたのは約15分で、衛星の上昇から沈没まで追跡していました」と、ワシントンD.C.の国立航空宇宙博物館で開催中のスミソニアン博物館の航海術展で、米海軍の潜水艦航法士ピーター・ボイン大佐は語った。
そして、TANG、スペースブランケット、無重力ペンと同様に、政府資金による支出は日常生活に徐々に浸透していきました。TRANSITは広く普及した商用ナビゲーションツールとなり(ソ連海軍が市販のリーダーを購入したという説もあります)、その後、はるかに高速なGPSシステムに取って代わられました。