数十年にわたる宇宙旅行において、私たちが必ずしも後始末を怠ってきたわけではないことは周知の事実です。運用停止した衛星、空のロケット燃料容器、そして2009年のロシアの衛星衝突事故のような過去の衝突による破片など、宇宙ゴミは地球の軌道上に徐々に蓄積されています。地球外からのゴミは、現在の宇宙飛行士にとって深刻な問題となっています。新たなミッションでは、障害物を追跡し回避するために綿密な計算が必要となるためです。国際宇宙ステーション(ISS)は、このような宇宙ゴミとの壊滅的な衝突を避けるため、年に数回調整を行っています。
しかし、ゴミをどうやって引き寄せて処分するのか、誰も知らない。持ち手があれば引っ掛けられるゴミもあるが、ゴミの多くは滑らかな表面でできており、アクセスポイントがない。そのため、スタンフォード大学のマーク・カトコスキー氏は水曜日のFacebookライブ配信で、「これは一種の未解決問題だ」と述べた。しかし、今週Science Robotics誌に掲載された論文で、カトコスキー氏と彼の同僚は、最も大きく危険なゴミを捕獲するために特別に設計された新しいタイプのグリッパーを発表した。
空気圧ポンプやダクトテープのような接着剤を使用する他のグリッパーとは異なり、このグリッパーはヤモリの足をヒントにした素材のタイルを使用しています。このグリッパーは、直径15ミクロン(人間の頭髪の10分の1)の毛のような微細なマイクロウェッジ構造をしており、一定方向に押すと曲がり、ファンデルワールス力によって接着します。タイルに貼り付け、2枚1組で使用すると、共通の紐を引っ張ることで素材が活性化し、垂直に持ち上げると解放されます。これにより、粘着力のオン/オフを簡単に切り替えることができ(再利用が可能)、太陽電池パネルや宇宙船の窓などの表面にも優しく作用します。
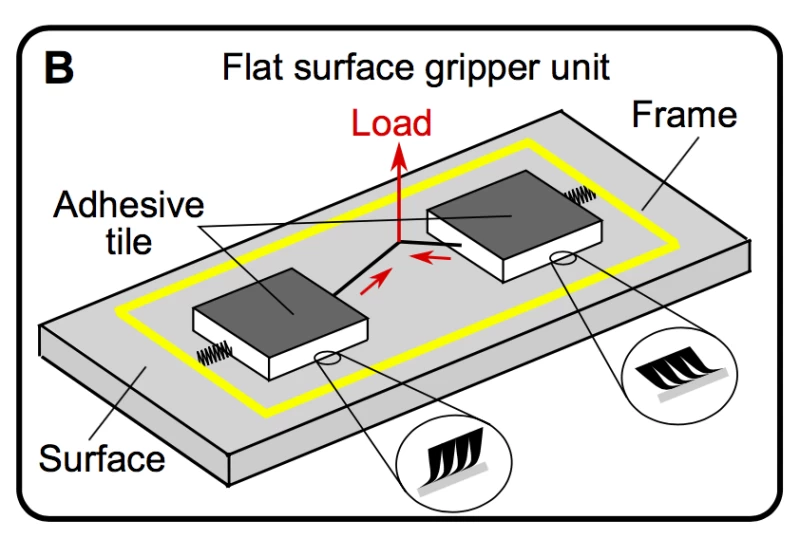
一対のタイルは滑車システムで連結され、張力を均等に分散します。表面を基準としたグリップは、表面の欠陥(小さな破片による穴や日焼けによる塗装の剥がれなど)の影響を受けやすいため、このシステムによりグリッパーの信頼性が向上します。もし、何らかの変化によって片方のパッドの張力が低下しても、残りのパッドが安全にそれを補うことができます。この荷重分散システムにより、これらのグリッパーは様々な用途に合わせて拡張することができ、登山ロボットの足のようなパッドから、スペースシャトルのドッキングスタビライザーまで、様々な用途に使用できます。
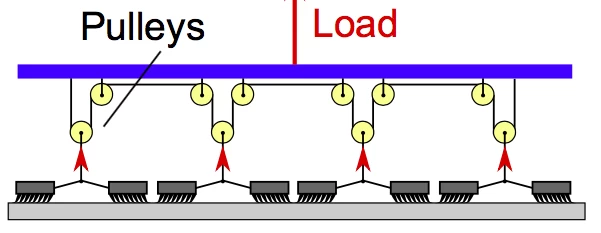
再利用可能で拡張性に優れていることに加え、このグリッパーは余分な動きを必要とせずに取り付けと取り外しができるという点で他に類を見ないものです。グリッパーはタッチセンサーによって作動し、接触すると自動的に物体を掴みます。宇宙飛行士はリリースボタンで物体を放すことができ、グリッパーは物体を揺らすことなくきれいに分離します。このきれいな分離は、物体の慣性によって制御不能に転がり落ちる可能性のある無重力状態では非常に重要です。研究者たちは、よりしっかりとした保持と、より少ない不確実性で解放するために、下図のような平面や曲面の円筒形に対応するグリッパーを設計しました。
大気の抵抗がないため、これらのグリッパーは衛星や宇宙船のような巨大な物体にも使用できます。地球上では物体を持ち上げるために握力が必要ですが、宇宙では掴んで操作するだけで十分です。そのため、NASAの微小重力環境を再現した「ロボドーム」(「巨大なエアホッケー台」と表現されています)では、1つのグリッパーで850ポンド(約360kg)のロボットに取り付け、牽引することができました。
「このグリッパーは、宇宙でも地球上でも(ニュートン単位で)同じ把持能力を発揮します」と、研究著者であるスタンフォード大学のハオ・ジャン氏はPopSciへのメールで述べた。「違いは用途です。地球上では物を持ち上げますが、宇宙では物をゆっくりと加速したり減速したりします。私たちのグリッパーは(地球上では)木箱を持ち上げることができますが、宇宙空間では車を掴んで操作することができます。」
制御された方法で取り扱い、移動できるようになれば、宇宙ゴミは大気圏に放出して安全に燃やすか、宇宙船に引き込んで分解・リサイクルすることができます。研究者たちは、これらのロボットが今後4~5年以内に宇宙で惑星以外のゴミを回収することを期待しています。それまでは、ロボットの活躍をご覧ください。