ロボットといえば、通常は周囲の世界を操作する3次元の生命体を思い浮かべます。しかし、イェール大学の研究者たちは、自然界とは異なるアプローチを取りました。既存の物体を包み込み、外側から操作する「ロボットスキン」を設計したのです。これは宇宙時代の課題解決を目的とした、非現実的なソリューションですが、開発者たちは地球上でも応用できることを期待しています。
「これは平らなロボットで、人工筋肉と、その筋肉の収縮度を検知するセンサーが埋め込まれています」と、研究著者のジョラン・ブース氏は語る。「巻き付けたものを制御できるのです。」
将来的には、発泡スチロールのチューブやボール、あるいはエール大学が公開したビデオに示されているように、剥製の馬など、あらゆる柔らかい物体に皮膚を巻き付ければロボットになる可能性がある。
ロボットは、その下にある物体が何であるか、また皮膚がどのように適用されるかに応じて、さまざまな用途に使用できます。
宇宙のような環境では、宇宙飛行士の収容能力は限られているものの、予期せぬ任務を遂行しなければならない可能性があります。そのため、場所を取らず、既存の物体への適応も支援できるこれらのロボットは、大きな力となる可能性があります。これらのロボットは、レベッカ・クレイマー=ボッティリオ氏のソフトロボティクス研究室(通称ファボラトリー)で、地球外での実用性を重視して設計されました。
NASAが宇宙飛行士向けのソフトロボットを募集した後、ブース氏とクレイマー=ボッティリオ氏はポピュラーサイエンス誌へのメールで、クレイマー=ボッティリオ氏は「ロボットを宇宙に送る際の制約、主に単位質量と体積あたりの輸送コストの高さについて考え始めました。最終的に私が辿り着いた疑問は、『宇宙用途向けロボットの重量とサイズを削減するだけでなく、ロボットの数も減らしたらどうなるだろうか?』でした」と記している。
このプロジェクトで予想外に困難だったのは、ロボットの全ての部品、つまり人工筋肉、皮膚、そしてそれらの相互関係を制御するセンサーを連携させることでした。チームは、センサーに人工筋肉の長さを認識させ、全体を連携させるのに苦労しました。論文では、様々な形状の皮膚と様々な種類の筋肉を思い通りに動かすことができたことを実証しています。
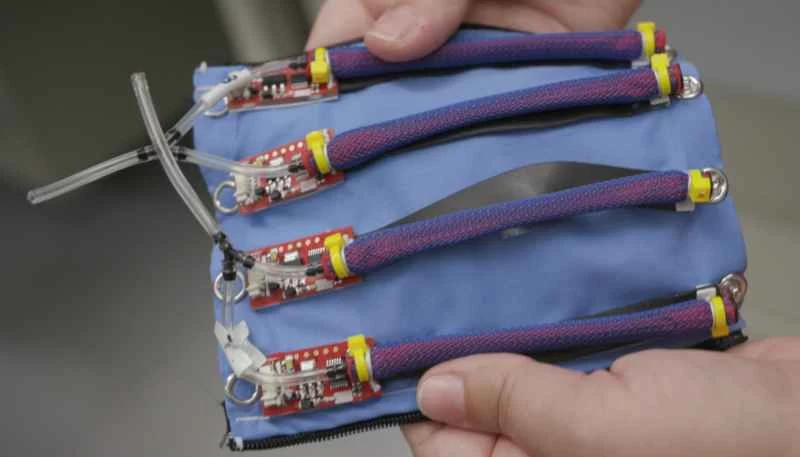
しかし将来的には、「ロボット用スキンの種類は非常に多様化するだろう」とブース氏は言う。論文に掲載された例(2つの長方形、空気圧「アクチュエータ」(いわゆる筋肉)を備えたエラストマースキン、金属合金アクチュエータを備えた布製スキン、そしてすべての面に合金アクチュエータを備えた布製三角形)から、部品を組み合わせることで、多くの可能性を秘めているとブース氏は語る。これらの平面型ロボットは、論文で紹介されている姿勢矯正シャツ(上図)の作成から、物体を掴むための複数部品のグリッパーまで、様々な用途が考えられる。
「私たちのコンセプトはシンプルですが、興味深いことに、文献には似たようなものを見つけることができませんでした」とクレイマー=ボッティリオ氏は記している。「これは、このコンセプトが生物に着想を得たものではないためだと考えています。完全に受動的な体と能動的な皮膚を持つ自然界の生物の例は、これまで見つかっていません。しかし、人工システムを構築する際には、このアプローチによって広大な設計空間が生まれます。」
残る問題は、この平たいロボットにどんな名前をつけるか、ということだけだ。パンケーキ?
