1日かそこらで完成する簡単なプロジェクト、あるいは子供たちにロボットや電子工作の世界を紹介するプロジェクトをお探しなら、この光追従ロボットを週末のプロジェクトにいかがでしょうか。コンセプトは非常にシンプルで、お手持ちのパーツを使って無限の方法で作ることができます。さて、今回は私がどのように作ったのか、詳しくご紹介します。
必要な材料:
- 2つの小型DCギア減速モーター - ここで使用されているのは「マイクロギアボックス減速モーター」と呼ばれ、さまざまなRPM仕様で利用できます。
- CR2032コイン型電池2個
- 6 LDR(光依存抵抗器)
- おもちゃの車から購入した、または再利用したホイール
- 厚さ1/2インチの木材、中密度繊維板、または同様の素材
- パーフボード(オプション)
必要なツール:
- はんだごて
- グルーガン
- ドリル、ビットセット、ホールソー
- ルーター、ミル、テーブルソー、または木材に空洞を追加するためのその他のツール
電子機器組立
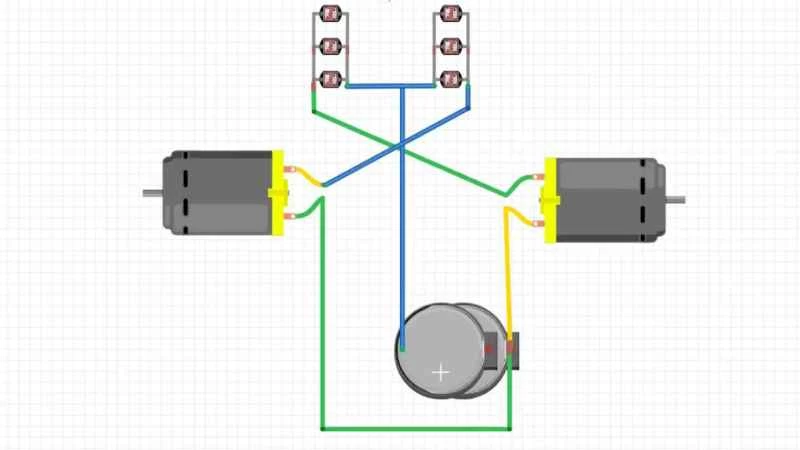
まず、デバイスの電子回路について説明し、次に実際の組み立て方法を説明します。組み立ては様々な方法で行うことができます。上の回路図に示すように、積層されたバッテリー(6V用に直列接続)のプラス側は、6つのLDRのそれぞれの片側に配線されています。これらのLDRのうち3つはロボットの左側に配置され、それぞれのバッテリー以外のリード線は右側のモーターに接続されています。残りの3つのLDRは右側に配置され、バッテリー以外のリード線は左側のモーターに接続されています。LDRに接続されていないモーターのリード線は、バッテリーのマイナス側に接続され、回路が完成します。
関連:この「皮膚」を着るとどんな物体もロボットに変身する
この設定では、左側のLDRアレイに光が当たると右側のモーターの抵抗が低下し、電力が供給されます。これにより、右側のモーターが前方に回転し、左側のアレイに当たる光の方向へ向きを変えます。他の3つの右側のLDRSと左側のモーターには逆の作用が働き、両側に均等に光が当たるとロボットは前進します。どちらかのモーターが後方に回転する場合は、バッテリーとLDRのリード線を入れ替えてください。
機械のセットアップ

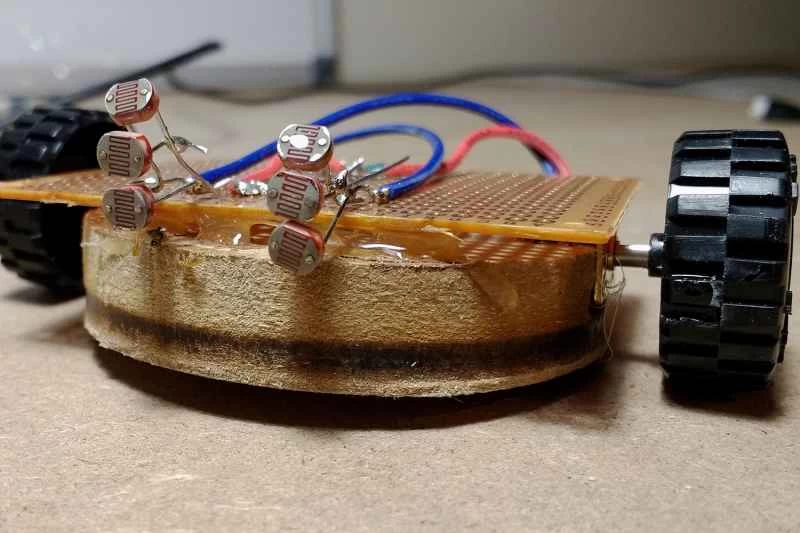
これらの部品を実際に動くロボットのように見せるために、まずフライス盤を使って中密度繊維板(MDF)に1/2インチの溝を切り、そこに小さなモーターを取り付けました。ルーターやテーブルソーをお持ちであれば、それらを使っても構いません。次に、2¾インチのホールソーを使って、中央に溝があるロボットの胴体となる円形の部品を切り出しました。最後に、溝の裏側のMDFにCR2032電池の形をトレースし、CR2032電池を入れるための大まかな空洞を切り出しました。
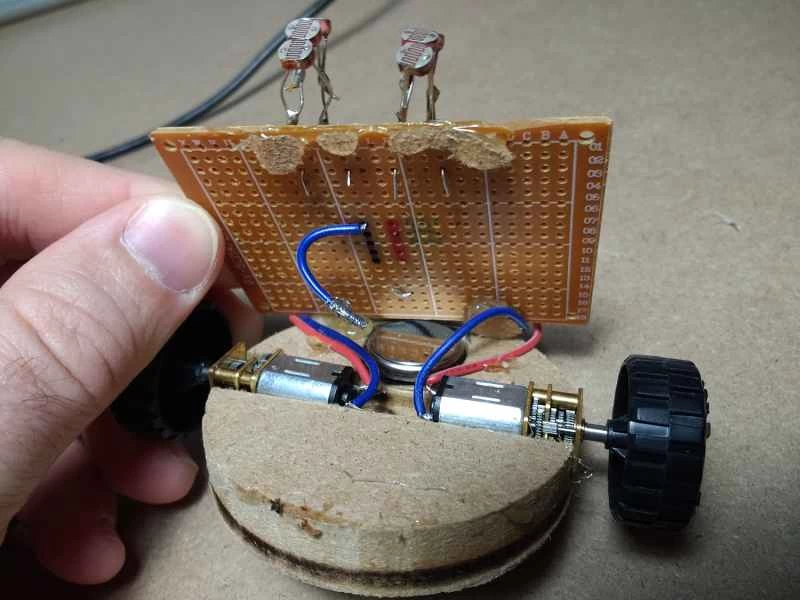
ここから、パーフォボードを使って回路図をレイアウトし、MDF本体にホットグルーで接着した際に、電池がプラスとマイナスの線で挟まれて電源が供給されるように配線を配置しました。(配線は被覆を剥がして絶縁体に巻き付けました。)モーターはホットグルーと接着したパーフォボードを組み合わせて固定し、ホイールはギヤモーターに直接押し付けられる直径にドリルで穴を開けました。
このセットアップは確かにうまくいきましたが、今にして思えば、特に基板が手元にない場合は、しっかりと接続するためのリード線が既に用意されている6Vコイン電池ホルダーを購入した方が簡単だったでしょう。その後、ホットグルー(つまり、さらにホットグルー)を使ってすべてを固定できます。
GIPHY経由
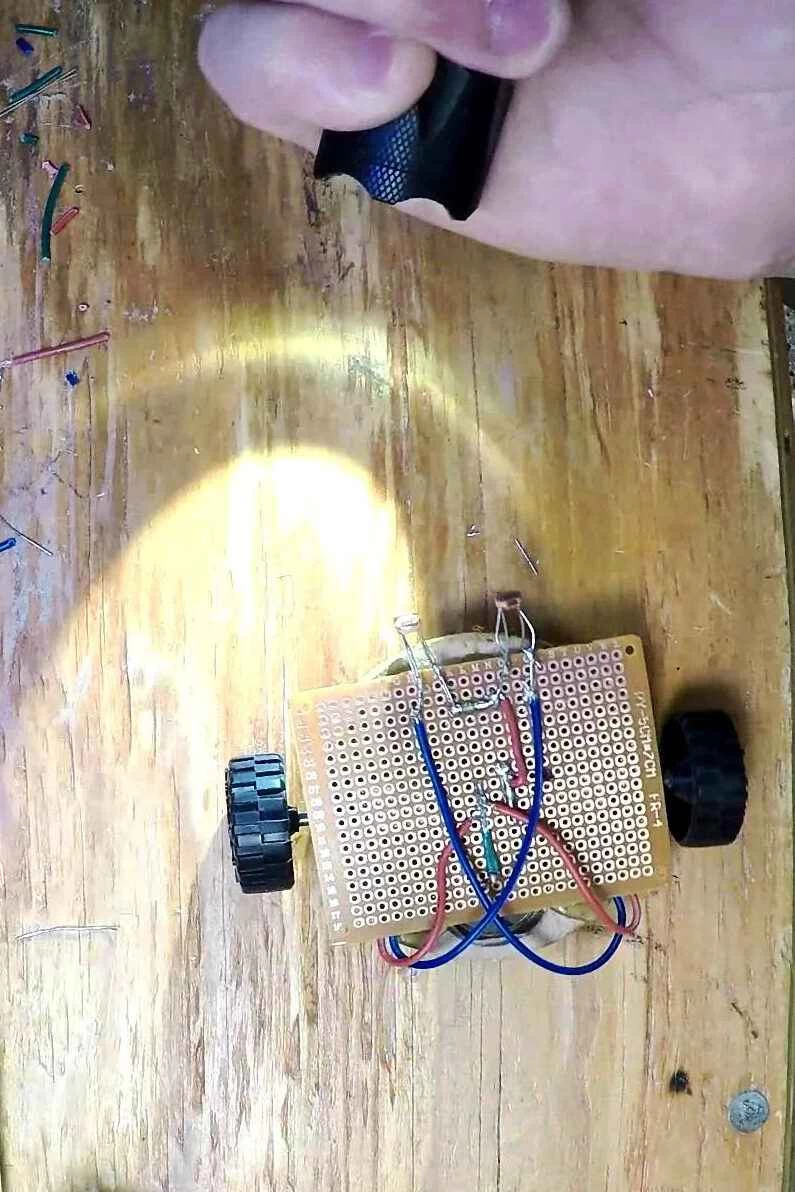
下の動画で紹介されている「ロボット」は、私が作った方法です。私のやり方をステップバイステップで真似してもいいですし、3Dプリンターなどで丁寧にデザインしたものを作ってもいいですし、手元にある工具と材料でとりあえず作ってみて、どうなるか試してみるのもいいでしょう。車輪で装置を転がすことができれば、懐中電灯の光を追う楽しいロボットが完成します。フレームは木材、プラスチック、段ボールなど、手に入りやすい材料で作ることができます。

(ジェレミー・S・クックは、フリーランスの技術ジャーナリスト兼エンジニアリング コンサルタントで、工場自動化分野で 10 年以上の経験を積んでいます。熱心な製作者であり実験家でもある彼は、Twitter でフォローできます。また、彼の電気機械に関する功績は、ジェレミー・S・クックの YouTube チャンネルでご覧いただけます。)
