ネバダ州議会は数週間前、自動運転車に関する新たな規制を定める法案を可決し、非常に先進的な動きを見せました。多くの車両は既に、駐車やスリップ防止など、かつては人間が操作していた作業に携わっており、ナビゲーション、判断、そして完全な自動運転ができるようになる日もそう遠くありません。
しかし、ある意味では、自律走行車の世界は既に私たちの目の前にあります。欧米の大手自動車メーカーは、比較的シンプルなソフトウェアと既存のハードウェアの調整によって、ハイブリッドエンジンや代替燃料とは全く関係のない方法で、自動車をよりスマートかつ環境に優しいものにしています。
車は互いに、そしてクラウドに接続することで、自ら判断できるようになるため、簡単に言えば、運転の未来は人間の手から大きく離れることになる。
アルゴリズムと分析技術は、数秒から数時間先までを予測し、ドライバーの行動を予測し、将来の通勤状況を予測します。レーダーを搭載したセダンは周囲の状況を感知し、ロードトレインや車車間ネットワークは渋滞を緩和し、死亡事故を防ぎ、燃費を向上させるでしょう。
「現在私たちが行っている多くのインタラクションは、ドライバーの作業を支援するためのものですが、私たちが目指しているのは、車を支援し、車をスマートにすることです」と、ミシガン州ディアボーンにあるフォード・リサーチ・アンド・イノベーションのエンジニア、ライアン・マギー氏は語る。「車をクラウドに接続すれば、非常に多くの可能性が生まれます。」ここでは、そのほんの一部を紹介する。
あなたの車はあなたがどこを運転するかを予測します
公共交通機関を利用しない場合、職場や学校への行き帰りのドライブは、おそらく決まったルーティンに沿っているでしょう。朝は自宅からカフェへ、そしてオフィスへ。夜はオフィスを出て、食料品店にちょっと寄ってから自宅へ。フォードは、あなたの予測可能性を活かし、イグニッションスイッチを入れた瞬間にどこへ行くのかを予測するクルマを作りたいと考えています。
研究者たちは、運転履歴を「Prediction API」と呼ばれる Google ソフトウェア サービスに入力している。この API は機械学習アルゴリズムを使用して、予測される行動 (この場合は特定のドライバーの習慣) のモデルを生成する。
「モデルに問いかけるのは、『この人は次にどこへ行くのか?』ということです」と、このモデルの開発に携わるマギー氏は語る。「モデルは、水曜日の午後5時なので、家に帰る可能性が高いと予測し、そのデータを車に送り返します。」
現在のシステムはインターネットに接続し、車がいつ、どこにいるかを記録します。アルゴリズムは、その場所と時間における可能性のある移動手段のリストを計算します。移動手段の可能性に基づいて、車は電力消費をガソリンではなくバッテリーに切り替えることができます。これはプラグインハイブリッド車にとって有益だとマギー氏は説明しました。フォードは、エスケープSUVのプラグインハイブリッドでこのシステムをテストしています。

将来、政府は学校や公園の近くに低排出ゾーンを設けたり、バッテリー専用レーンを設置したりするかもしれません。マギーさんは普段、仕事帰りに息子のサッカーの練習に迎えに行くそうです。車が彼の行動を記憶し、その地域に低排出ゾーンがあることを認識すれば、その時間帯のバッテリーを節約してくれるでしょう。
「そうすれば、目的地に着いた時に電気自動車で走れるように、十分なエネルギーを節約できます」と彼は語った。「人々が車をどのように使うのかをもっと理解できれば、その性能を最適化できるでしょう。」
しかし、どんなルーティンも破られる可能性がある。水曜日はブリトーが食べたいのに、木曜日はチーズバーガーが食べたくなったらどうだろう? 車はあなたが昼食時にどこに行くか全く予測できない。このランダム性とドライバーの気まぐれさを考慮すれば、もしこのシステムが量販車に搭載されたとしても、ドライバーはシステムに追加や修正を加えることができるだろうとマギー氏は述べた。
あなたの車は交通の動向を予測します
車がドライバー自身の習慣を理解すれば、クラウドから他のデータも取り込み、より的確な提案を行うことができます。交通予測者が十分なデータと、それを解釈する優れたモデルを持っていれば、昼食時に午後5時の通勤時間帯がどうなるかを予測できるはずです。IBMはこれを実現するスマートフォンアプリを開発しました。
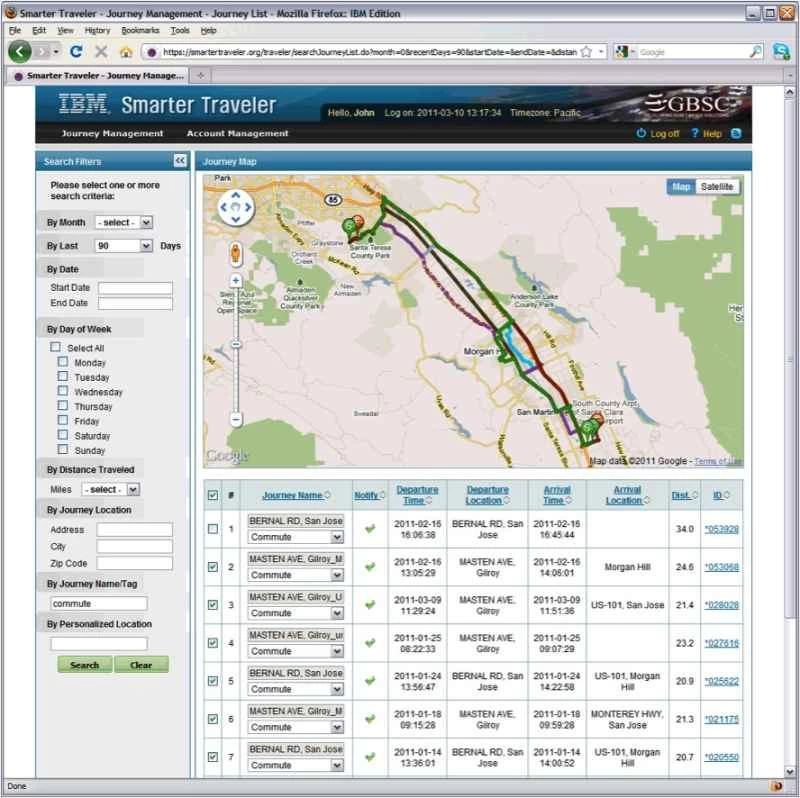
IBMによると、このアプリはドライバーの行動パターンを学習し、30分以上先の交通状況を予測し、ドライバーが運転する前にその予測を送信できるという。IBM Smarter Trafficのプログラム・マネージャー、ジョン・デイ氏によると、IBMはサンフランシスコ・ベイエリアでこのシステムをテストしているという。
このアプリは、スマートフォンのGPS機能を利用して、ドライバーの一日の様々な時間帯における動きを追跡し、その行動パターンを学習します。また、カリフォルニア州運輸局が以前に設置した700個の道路センサーシステムにも接続します。これらのセンサーは、車の速度と交通の流れを追跡し、1分あたりの車の数をカウントします。センサーは30秒ごとにデータを収集しますが、IBMはそれを5分ごとのデータに集約し、アルゴリズムに入力します。デイ氏によると、このアルゴリズムはデータ間の相関関係を分析し、パターンを抽出します。
「このツールは、渋滞の兆候を発見し、学習するのに優れています」と彼は述べた。「特定のエリア、特にインターチェンジで交通が渋滞すると、83%の確率で、あるいはそれ以上の確率で、はるかに大きな問題が発生するようになります。」
これらのシグネチャを用いて、システムはリアルタイムデータを分析し、5分ごとに変化する交通状況のモデルを常に更新して構築します。既存の予測システムは現状に基づいて予測を行い、何も変化がない場合の交通状況を予測しますが、このアルゴリズムは個々の行動の波及効果を認識し、考慮することができます。
デイ氏によると、ユーザーはパソコンからアプリにログインして「走行履歴」を確認でき、ルートの追加や削除も好みに合わせて選択でき、保存する情報の量も管理できるという。さらに、ドライバーがよく利用する店舗のクーポンをアプリで提供することも構想している。
「もし誰かがコーヒーショップを頻繁に通っていることを認識できる能力があれば、それは貴重な情報になるでしょう。しかし、その情報は慎重に利用し、ユーザーがそのデータを共有するかどうかを完全に制御できるように管理する必要があります。もちろん、そのような機能は確かに存在します」と彼は述べた。
しかし、このアプリの真の強みは、ドライバーが渋滞を避けるのを助けることだと彼は述べた。代替ルートを提案したり、ウェブベースの交通機関の時刻表を確認したりすることもできる。例えば、普段午前8時半に職場に向かうドライバーは、午前8時にその日の天気予報を含んだテキストメッセージを受け取るかもしれない。「今日の通勤時間は悪そうですが、この電車は8時半に出発します。パークアンドライドには48台分の駐車スペースがあります。」
デイ氏は、このシステムは道路センサーがあり、ドライバーがGPS対応のスマートフォンを持っている場所であればどこでも機能する可能性があると述べた。
「どの都市に行ってニュースを見ていても、誰かが交通状況について話しているときに、天気予報士のようにヒートマップが表示されるのが普通です」と彼は言った。「ほぼすべての都市に、何らかの道路センサーネットワークが設置されています。」
あなたの車は歩行者や他のドライバーの次の動きを予測します
車はあなたの行動と大勢の人々の行動を把握できるようになりました。次は、6メートル先の車が何をしようとしているのかを知る必要があります。車車間ネットワークと高度な制御アルゴリズムにより、予期せぬ事態は発生せず、将来的には事故も発生しなくなります。また、エンジン効率を向上させ、渋滞を防ぐことで排出量を削減することもできます。
今週、米国運輸省は、将来のコネクテッドカーの機能をドライバーがテストできるパイロットプログラムを発表しました。このシステムにより、車同士、そして信号や踏切などの道路インフラと通信が可能になりますが、ドライバーはまずそれに慣れる必要があります。6都市で実施されるクリニックでは、人間がワイヤレスコネクテッドカー技術をテストし、どれだけ適応できるかを検証します。
人間がうまく適応できなければ、車はすぐにそれに対処する能力を備えるようになるでしょう。MITの研究者たちは、人間の行動モデルを組み込んだ新しいアルゴリズムを開発しており、衝突の可能性をドライバーに警告し、衝突を防ぐために車の制御を引き継ぎます。
このシステムでは、運転はブレーキと加速という2つの動作に集約されます。MITニュースによると、先月この新しいアルゴリズムを特集した記事によると、ドライバーが特定の時点でどちらの動作をしているかによって、車が次にどこにいるかの選択肢は限られているとのことです。MIT機械工学助教授のドミティラ・デル・ベッキオ氏は、交差点でのドライバーの減速や加速といった人間の行動を予測するモデルも組み込んでいます。
MITによると、このシステムは交差点で車両が衝突する危険性のある地点を特定できるという。このアルゴリズムを搭載した車は、信号や車載センサーの情報も参考にしながら、他の車の行動を予測し、それに応じて衝突を回避する。

人間の運転手が全く存在しない未来においては、アルゴリズムは協調して行動する車の台数が変動することを考慮し、一つの行動の波及効果を考慮する必要があります。例えば、ある車が衝突を避けるために減速すると、他の車も行動を変えなければなりません。分散制御システムは、特定のグループ内のすべての車の加速、ブレーキ、車線変更、高速道路からの出口を制御します。
カーネギーメロン大学の研究者たちは、複数の車両が複数の複雑なタスクを実行する場合でも、このようなシステムの安全性を証明できるシミュレーションを構築しました。コンピュータサイエンスの助教授であるアンドレ・プラッツァー氏率いるチームは、1車線に2台の車両を走らせることから始めました。その後、任意の台数の車両でも機能することを実証するために車両を追加し、さらに車線を追加して車両数の変化にも対応できることを示しました。最終的に、このシステムは、直線の高速道路において、車両や車線の種類に関わらず、衝突防止機能を維持しました。プラッツァー氏はCMUの発表で、今後のシミュレーションでは、カーブ路などの変数を考慮する必要があると述べています。
しかし、自動運転車群の制御システムは、もう少し先の未来に実現されるでしょう。渋滞を緩和し、衝突を回避するために、車同士が協調して動作するのに高度なアルゴリズムは必要ありません。ヨーロッパの研究者たちは、車同士が通信できるようにするだけで、既にこれを実現しています。このようなシステムは、車がスリップストリームを走行することで、排出量を削減し、エンジン効率を向上させることができます。
スウェーデンの自動車メーカー、ボルボは、プロのドライバーが先導する車列を組む「ロードトレイン」の試験走行を行っている。車は無線で列車に接続し、アダプティブクルーズコントロールシステムが先頭車両の速度に追従する。車に搭載されたセンサーが、各車両が安全な車間距離を保つよう制御する。ボルボは今年初め、1台の車とセミトレーラーを連結したロードトレインの試験走行を行った。
目標は燃料消費量の削減、渋滞の緩和、そして運転の安全性向上だ。自動車メーカーは2020年までにこの技術を導入したいと考えている。
先月、ドイツの研究者たちは、1,000台中5台の通信だけで渋滞を緩和できることを発見しました。車に搭載されたセンサーはデータを収集し、ローカル無線ネットワークを介して他の車と交換するだけでなく、中央交通管制センターに中継することができます。1年間の試験から得られた予備データによると、渋滞緩和には少なくとも5台の車があれば十分であることが示されました。この試験は、欧州連合(EU)の「適応型ネットワークとテレマティクス基盤を備えたモビリティのための動的情報・アプリケーション(DIAMANT)」プロジェクトの一環として行われました。
車はそれほど変わらない ― コンピューターが変わる
自動車メーカーと消費者にとって朗報なのは、これらの技術のほとんどは、いくつかの簡単なコードとアルゴリズムの変更で実装できるということです。車は大幅な改良を実現するために、車輪の再発明をする必要はありません。こうしたアップデートにより、今後数年のうちに運転ははるかに安全になり、ストレスも大幅に軽減されるでしょう。さて、人間ももっと賢く運転してくれれば…