すでに建設が始まっているこれら 2 つのプロジェクトにより、人類は地球上で最も過酷な環境であるサハラ砂漠と南極大陸の南極点で作業する必要がなくなります。
サハラ砂漠での建設
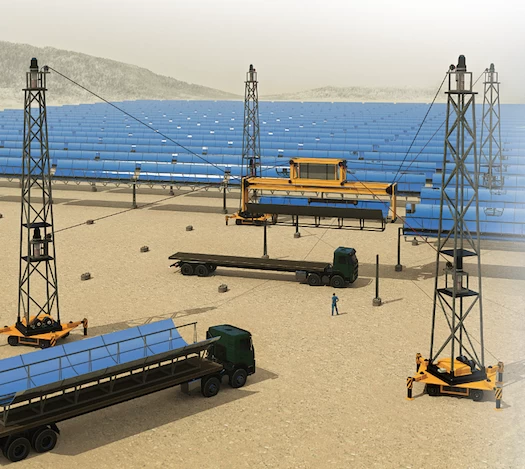
ドイツ・シュトゥットガルトにあるフラウンホーファー製造・工学・自動化研究所は、サハラ砂漠に2,270平方マイルの太陽光発電所を建設するためのロボットを開発しています。重さ100トンの産業用パラレルキネマティクス装置(IPAnema)は、NFLの試合でフィールド上空を飛行するスカイカムに似ています。4つの移動式タワーの間に張られた2,000フィート(約600メートル)のポリエチレンケーブルが、太陽光反射板を掴むための顎を備えた箱型のエンドエフェクタを吊り下げています。IPAnemaは2015年に稼働開始予定です。
エンドエフェクタ:掴み上げと持ち上げのために設計された鋼鉄とアルミニウム製のエンドエフェクタは、7トン、長さ40フィート(約12メートル)の太陽光反射板を数千個も丁寧に持ち上げ、設置します。そして、4つの支持タワーの間にある26,896平方フィート(約2,600平方メートル)の任意の場所に設置します。
ウインチ: IPAnemaのモーター駆動ウインチは、吊り下げられたエンドエフェクタを制御する8本のケーブルを高速で巻き取ったり繰り出したりします。ウインチはエンドエフェクタを3軸すべてで約4.8km/hの速度で回転させ、各ケーブルは約10,000ポンド(約4,500kg)の荷重を支えることができます。
力センサー:ウインチと吊り下げられたエンドエフェクタの両方に接続されたケーブルの両端には、力センサーが取り付けられています。これらのセンサーは、ウインチのモーターを2ミリ秒以内に同期させ、エンドエフェクタの空間内での動きをミリメートル単位で追跡します。
サポートタワー:ロボットのフレームシステム(高さ36フィートのモジュール式鉄塔4本)は、自動化されたベース上に自動的に配置されます。4本のタワーは、ペイロードの揺れを防ぐために常に張力をかけ、砂漠の強風による事故からロボットを守ります。—アーニー・クーパー

南極大陸を横断する
この冬、全米科学財団(NSF)とその契約企業であるレイセオン・ポーラー・サービスは、南極沿岸部のマクマード基地(アメリカの主要な物流拠点)からアムンゼン・スコット基地まで、燃料を1,040マイル輸送する。1世紀前、ノルウェーの探検家ロアール・アムンセンが人類初の南極点到達者となった。彼は犬ぞりとスキー板を使った。NSFとレイセオンはまもなく、キャタピラー社とケース社の自動トラクターを導入する。このロボット車両は、時速5~12マイル(約8~19km)で大陸を24時間体制で横断し、アムンセンが約2か月かけて行った作業をわずか1週間半で達成する。
燃料ブラダー:各トラクターは少なくとも 10 個の 3,000 ガロン燃料ブラダーを運搬し、2,080 マイルの往復中に 2 個近くを消費します。
先導車両:搭載コンピューターが燃費を最大化するための最適な速度と方向を決定し、その情報を他の車両に伝達します。アルゴリズムが物体の「脅威」を判断し、それに応じてトラクターのルートを変更します。
ツインカメラ:約30センチ間隔で設置された2台のカメラは、雪の山、スノーモービル、人、そして開いたクレバスを区別するための立体画像を生成します。そして、カメラは物体または地物までの距離を測定します。
ARS-300レーダー:この車両は、Googleの自動運転車に搭載されているものと同じレーダーを使って、嵐の中を「見通す」。レーダーはトラクターのレーザースキャナーほど正確に地表構造を読み取ることはできないが、吹雪はレーザーを混乱させる。
**レーザースキャナー:** トラクターのレーザースキャナーは、最大60メートル離れた地形の詳細を捉え、地図を作成します。この地図はコンピューターにアップロードされ、ナビゲーションに使用されます。このスキャナーは、トラクター同士の衝突回避にも役立ちます。—アンディ・アイザックソン